
Making things easier
With every release, we add new capabilities to improve the usability of Simulink. In R2011a, there is a good list of enhancements that should make your life a little bit easier. Here are a few examples:
Creating protected models via right-click
In R2009b, protected model reference was introduced. To use this feature, you had to use the Simulink.ModelReference.protect command to generate the protected model, then drag a model reference block from the Simulink Library and specify the name of the newly created file.
In R2011a, all you have to do is right-click on the Model Reference block to protect and select Code Generation -> Generate Protected Model.
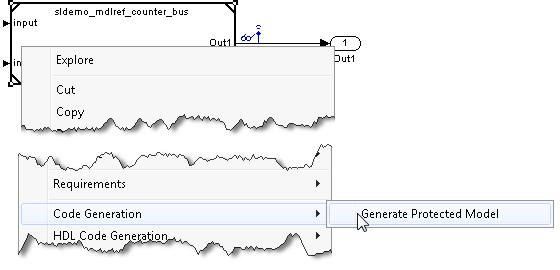
A protected model is saved in the current directory and a new model is created with a Model Reference block already configured.
Creating MATLAB structures from the Bus Editor
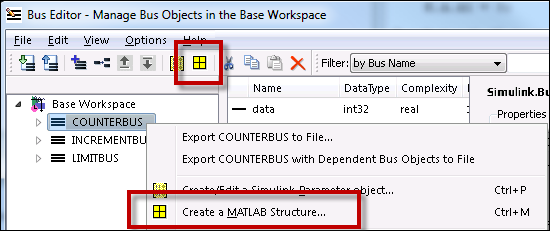
Since R2010a, it is possible to use a MATLAB structure to specify initial conditions of a bus signal. When you have a bus object in the workspace, you can use Simulink.Bus.createMATLABStruct to automatically create the structure. In R2011a, a menu item and a toolbar button have been added to the Bus Editor to invoke Simulink.Bus.createMATLABStruct:
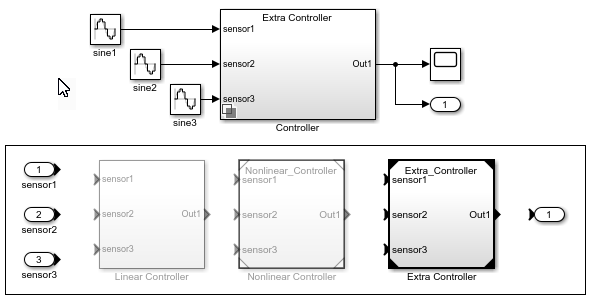
Model Reference Parameter dialog box displays model names of all variant choices
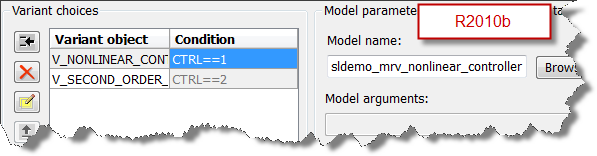
Model Reference Variants were introduced in R2009b. Before R2011a, the table of variant choices had 2 columns: Variant object and Condition. This means that to see the associated model on the right, you had to click on each variant individually:
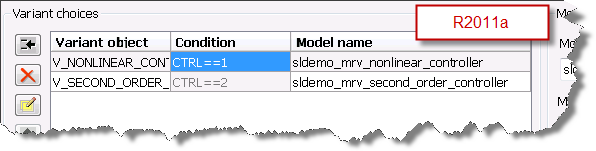
In R2011a, a column has been added to see the model associated with each variant:
Now it's your turn
Are you going to take advantage of these enhancements? Do you have suggestions to improve the usability of Simulink? Leave a comment here.
- Category:
- Simulink Tips,
- What's new?


See Also
-
Model Reference Variants
Blogs




Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.