 Cleve’s Corner: Cleve Moler on Mathematics and Computing
Cleve’s Corner: Cleve Moler on Mathematics and Computing The MATLAB Blog
The MATLAB Blog Guy on Simulink
Guy on Simulink MATLAB Community
MATLAB Community Artificial Intelligence
Artificial Intelligence Developer Zone
Developer Zone Stuart’s MATLAB Videos
Stuart’s MATLAB Videos Behind the Headlines
Behind the Headlines File Exchange Pick of the Week
File Exchange Pick of the Week Hans on IoT
Hans on IoT Student Lounge
Student Lounge MATLAB ユーザーコミュニティー
MATLAB ユーザーコミュニティー Startups, Accelerators, & Entrepreneurs
Startups, Accelerators, & Entrepreneurs Autonomous Systems
Autonomous Systems Quantitative Finance
Quantitative Finance MATLAB Graphics and App Building
MATLAB Graphics and App Building
Model-Based Design Dilemma
I am currently working on a model and I have a dilemma. There are two ways I could model my system. I need you to tell me which approach is best and why.
I need your help!
The Goal
I am building a model to drive a small robot made of Lego blocks. The system is similar to the NXTWay-GS submission on the MATLAB Central.

Following a Model-Based Design approach, I want to setup my files so that I can easily develop my controller in simulation and generate code to test my algorithm on the real hardware. This means that in simulation I need to send my actuator commands to an LTI system approximating the system dynamics; and for code generation I need to send and receive signals from hardware drivers.
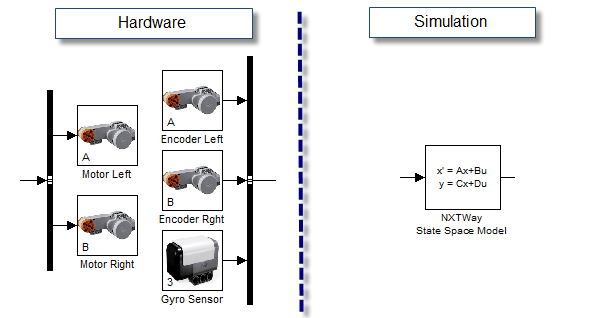
My question now is: What is the best way to include these 2 sets of blocks in my model architecture?
Option 1: Two Top Models
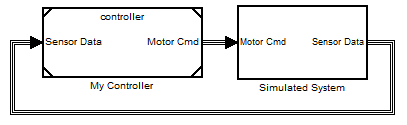
My first option is to create 2 top models that will both refer to the same controller using model referencing.
I would have one top model for simulation:
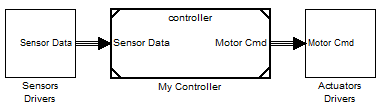
and one top model for code generation:
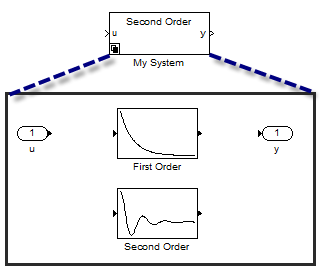
Option 2: Subsystem Variants
My second option is to create one top model. In this top model, use Subsystem Variants to switch between the simulation and the hardware drivers:

Now it's your turn
What architecture do you prefer? For which reasons? Do you see other options? I am very interested to hear your comments and ideas. Please leave a comment here.







Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.