
Robots That Adapt at Run Time Across Changing Configurations
Robotic systems are often required to operate in environments that change during operation. This may include switching tools, updating workspace layouts, or handling new tasks. To support this, developers need a software structure that allows changes without stopping the system or rebuilding code.
A recent customer project from MinMaxMedical, a surgical robotics company in France, demonstrates how this can be achieved using Robotics System Toolbox™ together with Simulink®, Stateflow®, and Embedded Coder®. In their system, the robot model itself can be modified at run time, enabling a level of flexibility that is difficult to achieve with traditional workflows.
Runtime reconfiguration using Rigid Body Tree
In many robotics applications, the robot’s kinematic structure is defined when the software is built. Changing the robot configuration often requires regenerating code and redeploying the controller.
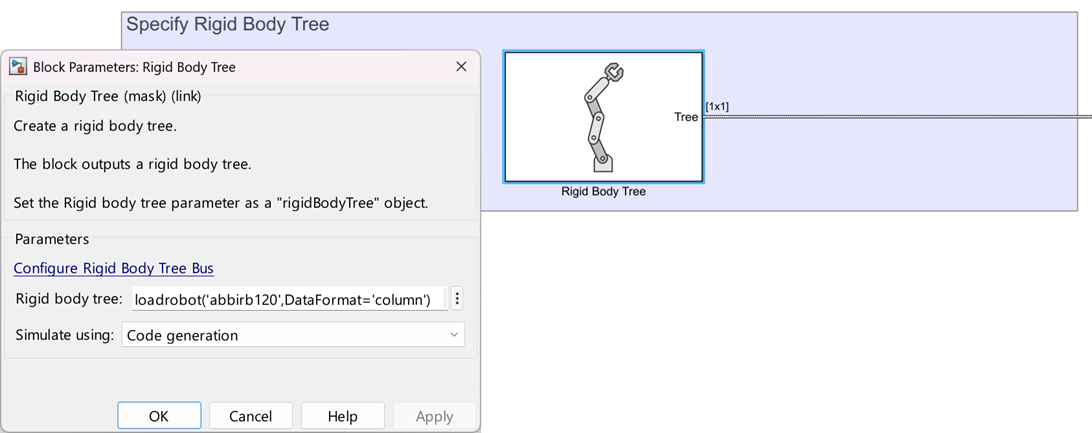
MinMaxMedical used Robotics System Toolbox to represent their robot using the Rigid Body Tree model, which defines the links, joints, and geometry of the manipulator in software. Because this representation exists as a model rather than fixed code, the system can update the robot structure while the controller is running.
This allows the software to:
- Attach or remove tools without rebuilding the application
- Update kinematics dynamically
- Modify collision geometry at run time
- Reuse the same controller across different robot configurations
This approach removes the need to rebuild the application for each configuration.
Maintaining safety while the robot changes
In surgical robotics, any change to the robot must still meet strict safety requirements.
Using Robotics System Toolbox, collision objects and environment geometry can also be updated during execution. This allows collision checking to remain accurate even when tools or workspace layouts change.
Because these updates occur within the same framework, the system can maintain real-time performance while applying changes.

Not limited to surgical robotics
Although this example comes from surgical robotics, the same requirement appears in many other robotic applications.
Robots today are often expected to handle multiple configurations, different tools, and changing environments. This is common in:
- Industrial robots used in flexible manufacturing
- Research robots with interchangeable end effectors
- Service robots working around people
- Autonomous machines operating in unstructured environments
- Medical, aerospace, and defense robotics platforms
In all of these cases, representing the robot using Rigid Body Tree in Robotics System Toolbox allows developers to build software that can adapt without rewriting the entire system.
Instead of creating a new application for every robot configuration, the same architecture can support multiple robots, tools, and layouts.
Learn more
This post highlights one aspect of the workflow — runtime robot reconfiguration using Rigid Body Tree in Robotics System Toolbox.
The full user story describes how this capability was used in the development of a surgical robotic platform, but the same approach can be applied to many types of robotic systems.
Read the full story to learn more:
Powering Next-Generation Surgical Robotics – Model-Based Design Enables Development of Adaptive Surgical Robots
If you are developing robotic systems that need to support multiple configurations, changing tools, or dynamic environments, this example shows how a model-based approach with Robotics System Toolbox can help build more flexible and reusable robot software.
- 类别:
- Robotics Systems





评论
要发表评论,请点击 此处 登录到您的 MathWorks 帐户或创建一个新帐户。