
Leveraging Simulink and Cube Autopilots for Autonomous System Development
Autonomous systems have emerged as transformative technologies across industries, from Unmanned Aerial Vehicles (UAVs) to maritime robotics. Central to their functionality is the autopilot — a sophisticated software and hardware framework that acts as the brain behind autonomous decision-making and control.
Autonomous systems rely on autopilots to perform complex tasks with minimal human intervention. They integrate sensor data, control algorithms, and decision-making processes to navigate environments, adapt to changing conditions, and execute missions safely and efficiently. Beyond simple path-following or stabilization, modern autopilots incorporate advanced features such as obstacle avoidance, swarm collaboration, and real-time adaptability to dynamic environments.
Today’s blog is from a guest writer, Siddharth Purohit. Siddharth is a Lead Software Engineer at CubePilot with over 10 years of experience in programming embedded and autonomous systems, during which he has also been a continuous member of the ArduPilot open-source support community. In fact, CubePilot is also assisting in the development of ArduPilot support for Cube Autopilots in Simulink.
========================
Simulink and Cube Autopilots – Bridging Software and Hardware for Autonomous Systems
Among the many autopilots available today, Cube Autopilots stand out as a versatile and reliable choice for unmanned systems (UxVs). Recognized for their modular design, open-source support, easy integration with a variety of sensors and components, and straightforward upgrading through the standardized Carrier Board connection scheme as well as customization for specific application Cube Autopilots are widely used across industries and research domains. Their compatibility with Simulink further enhances their appeal, offering a streamlined pathway from algorithm development to deployment.

Figure: Deployment flight controller on Cube Orange Autopilot from Simulink
Simulink provides built-in support for Cube Autopilots, enabling engineers to directly integrate their flight control algorithms with this robust hardware. By leveraging Simulink’s Model-Based Design capabilities, developers can design, simulate, and validate their systems before deploying code to Cube Autopilots. This integration simplifies the development process and ensures that the resulting autonomous system is both reliable and high-performing, with the following particular advantages:
- Automated Code Generation: Simulink Coder enables automatic conversion of control models into executable code compatible with Cube Autopilots, minimizing manual coding efforts.
- Validation Across Stages: With workflows like Model-in-the-Loop (MIL), Software-in-the-Loop (SIL), and Hardware-in-the-Loop (HIL), Simulink supports comprehensive testing at every stage of development.
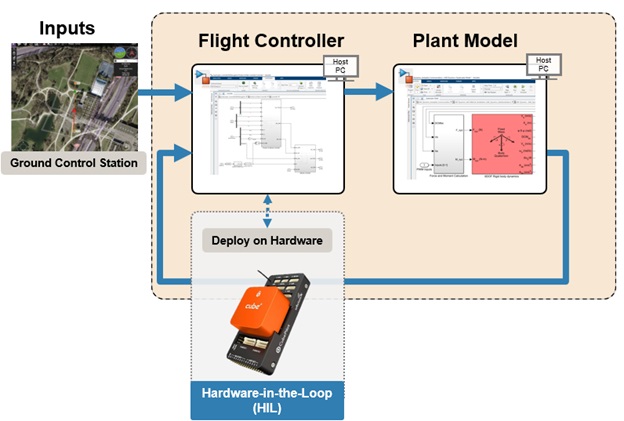
Figure: Hardware-in-the-Loop (HIL) simulation for deploying and executing the flight controller to the Cube Orange Autopilot communicating with the simulated plant.
Applications in the Real World
Simulink’s integration with Cube Autopilots has powered numerous successful projects in domains ranging from UAV research to Advanced Air Mobility (AAM). For example:
- UAV Research: Fixed and rotary wing VTOL vehicles equipped with Cube Autopilots have been used in research projects, with Simulink aiding in the development of guidance algorithms to deploy to the autopilot [1, 2].
- Fault Tolerant Control: Fault detection and identification (FDI) and fault-tolerant control development for a quadrotor [3].
- Advanced Air Mobility: A team at NASA Langley utilized the Simulink and Cube Autopilot workflow to rapidly deploy custom control laws to a multirotor aircraft. Their work, aimed at accelerating innovation in the advanced air mobility market, is documented in their methodology [4, 5].
Whether for UAVs, Autonomous Mobile Robots (AMRs), boats, or submarine systems, the combined strengths of Simulink and Cube Autopilots offer a reliable platform for autonomous system development.
Conclusion
Simulink and Cube Autopilots together offer a robust framework for developing and deploying autonomous systems. By leveraging Simulink’s model-based design and simulation capabilities alongside the versatile Cube Autopilots, engineers and researchers can effectively bring their autonomous vehicle projects to fruition. This integration not only simplifies the development process but also enhances the reliability and performance of the final product.
For further reading and resources regarding this workflow, explore Simulink’s support for Cube Autopilots and learn how to optimize your development workflow with this seamless integration.
- Category:
- Unmanned Aerial Vehicles







Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.