
How MathWorks is Enabling Supernal’s Advanced Air Mobility Development with Integrated Simulation Systems
Co-authored by Mihir Acharya, Senior Product Manager, Robotics and Autonomous Systems at MathWorks, and Fahad Khan, Head of Integrated Simulations Systems, Advanced R&D at Supernal, a Hyundai Motor Group company. We are excited to announce the collaboration between Supernal and MathWorks to build simulation workflows for advanced air mobility missions.
Supernal is on a mission to open city skies by accelerating a new zero-carbon mobility paradigm – electric air vehicles that operate with an unrelenting focus on safety, customer needs, and ground-to-air connectivity. To reach its full potential, advanced air mobility must be integrated into existing transportation networks. For this, Supernal is collaborating with public transportation agencies, policymakers, and technology providers, including MathWorks, to work out the details of the complete ground-to-air ecosystem.
At Supernal, we’re insistent that our solution be an open system, not a proprietary network. Our integrated simulation systems related R&D efforts are no different, as we build a next-generation aerospace company from the ground up.
Supernal and MathWorks are working together to build scalable simulation systems, including ones that can visualize an eVTOL (Electric Vertical Takeoff and Landing) aircraft at any location on the globe. As a result of this collaboration, we jointly prepared a demonstration of Supernal’s SA-2 aircraft, following a flight path through the city of Los Angeles using simulation tools from MathWorks.
This simulation of the eVTOL – realistic in terms of both the vehicle behavior and the rendering of the environment – simulates a takeoff in Los Angeles, navigates a 15-minute flight, and lands at the designated vertiport located in the Universal Studios Hollywood parking garage.
This builds on Supernal’s use of MathWorks capabilities for the development of the eVTOL, especially the advanced controls systems. It also has laid the groundwork for future endeavors, where the sky is not the limit but the starting point.

Fig 1. Photorealistic visualization of Supernal’s eVTOL aircraft flying in Los Angeles using MathWorks tools including the Simulink and Unreal Engine® interface
The Challenge: 3D Photorealistic Visualization of Supernal’s eVTOL Platform in a Real-World Location
Supernal’s vision for this collaboration was to create a simulation workflow that can aid with understanding the flight behavior of an eVTOL aircraft within the urban landscape, for verifying the aircraft subsystems, and for showcasing and establishing the use cases. To achieve this, the collaboration between Supernal and MathWorks started with defining the requirements in the following 3 parts:
- Photorealistic visualization: The first challenge was not just to simulate the flight trajectories, but to render it in a photorealistic visualization that captures the essence of the cityscape and the vertiport. It involved visualizing Supernal’s custom VTOL aircraft with tilting rotors in a photorealistic scene.
- Emphasis on Pilot’s Workflow: The goal was to visualize flight trajectories and corridors with an emphasis on timing and the pilot’s workflow. The ability to simulate the entire cockpit view, especially in challenging weather conditions, was crucial.
- Battery health monitoring: Supernal’s commitment to safety and reliability meant that battery performance was a significant consideration. A cockpit view needed to be synced with the simulation.
The Solution: Visualization of Supernal’s eVTOL Flying Through Los Angeles Using MATLAB and Simulink
Supernal used MathWorks solutions for high-fidelity visualization that can create a real-world environment for urban simulations. Simulink can be used to visualize an aircraft in real-world locations through the interface with Unreal Engine® and Cesium. Two most important aspects for this simulation were –
- Providing visual feedback, critical for both pilot experience and autonomy algorithm design.
- Integrating real-world geospatial data into the flight visualization.
While Supernal had a detailed plant dynamics model of their eVTOL in Simulink, they provided MathWorks with a 15-minute flight trajectory generated using a lower fidelity plant model. The flight trajectory included the following parameters:
- Real-world geographic coordinates
- Flight attitude
- Power consumption
- Battery capacity
- Battery temperature
This flight trajectory was imported in MATLAB, where UAV Toolbox was used to interpret the latitude and longitude data and Simulink 3D Animation enabled the Unreal Engine visualization. The interface with Unreal Engine allows to bring a custom mesh model, which in this case was the virtual model of the SA-2 eVTOL aircraft provided by Supernal. Further, Google Tiles was used to render the provided geographic location with high fidelity.
Fig. 2 Flight visualization of Supernal’s SA-2 eVTOL aircraft flying through the city of Los Angeles with synchronized video from the cockpit view and battery health monitoring dashboard.
Further, the battery health data – including battery SOC, temperature, and power consumption – was incorporated into the simulation. This addition ensured that the demonstration didn’t just showcase a flight trajectory but also provided insights into the battery’s performance throughout the flight.
Learn More about MathWorks Capabilities
MathWorks supports the broader needs of advanced air mobility solutions, not only high-fidelity visualizations. These capabilities include:
- Vehicle Dynamics Modeling and Battery Management Systems
- Autopilot Software and Controller Performance
- Autonomy Algorithms and Guidance Logic Design
- Code Generation and Deployment
- Certification
Recognizing the unique challenges of designing a controller for VTOL aircraft, MathWorks has developed a comprehensive tutorial example that guides users through the following steps:
- Customizing a VTOL plant model
- Tuning Control Design for the VTOL aircraft in different flying modes such as hover, fixed-wing flight, and transition
- Visualizing the VTOL UAV mission in Unreal Engine
- Hardware-in-the-loop simulation workflows
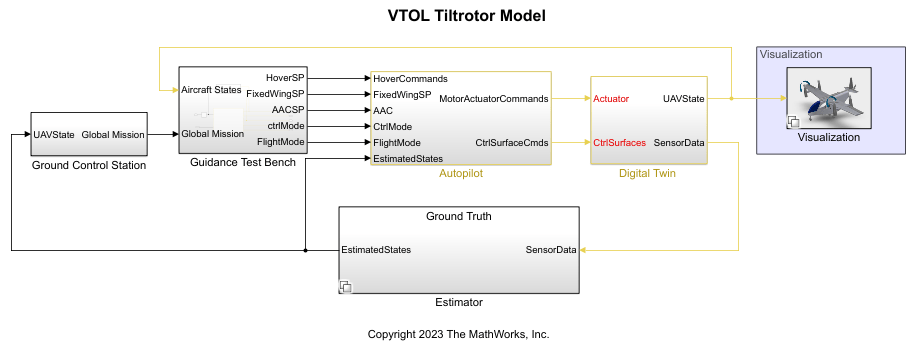
Fig 3. Simulink model from the VTOL Controller Template in UAV Toolbox for customizing VTOL configurations
These comprehensive steps ensure that users of MathWorks’ UAV solutions can design, simulate, and visualize every aspect of a VTOL aircraft’s operation ranging from the initial design phases to the final deployment.
Ongoing Integrated Simulation Systems and R&D workstreams between Supernal and MathWorks
Supernal is utilizing MathWorks tools for end-to-end modeling and simulation workflow and process improvements across its engineering and R&D workstreams.
The Integrated Simulation Systems team at Supernal plans to collaborate with MathWorks to establish a long-term roadmap aimed at defining the state of the art in photorealistic simulation systems for advanced air mobility research and development.
We plan to jointly publish our research and development findings to benefit the advanced air mobility and aerospace community.
- Category:
- Unmanned Aerial Vehicles,
- Updates





Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.