
Startup Shorts: Humotech is Transforming Wearable Device Development
“As an avid outdoorsy person, the idea of losing my mobility and not being able to explore the world is a scary thought,” says Josh Caputo, but this is an unfortunate reality for many people. Empathizing with those dealing with impaired mobility and inspired to push the limits of human performance, Josh was determined to realize the potential benefits of robotics, an area he had grown familiar with during his time as a student at Carnegie Mellon University. As President and CEO of Pittsburgh, PA based startup Humotech, he and his team have developed a wearable robotics platform to research, prototype, and evaluate solutions to assist and augment human mobility.
THE CAPLEX SYSTEM
The Caplex system is a wearable, programmable robot that emulates the real-world physical characteristics of wearable machines and is designed to help people develop wearable devices, such as exoskeletons, prostheses, and orthotics. The platform allows users to systematically vary the behavior of a single device, giving the user the physical sensation of wearing a variety of devices while wearing just one.
As Ryan Mott, Software Engineering Manager, illustrates, “For users, you can put on one emulator, and try on a host of devices, switching from experiencing one device to the other without even breaking stride.” This allows researchers to compare two devices back-to-back more precisely, without losing important subtleties that would potentially be forgotten in the time spent switching physical devices.
Like in a shoe store, where a person can quickly and easily try on a variety of options to fit their need, style, and comfort, imagine having this same variety of fine-tuning parameters and speed when designing and trialing wearable devices. The Caplex system enables medical device researchers to do just that.
 Full-Size Caplex System with PRO-002 Ankle Prosthesis. (Image courtesy of DoD Center for the Intrepid)
Full-Size Caplex System with PRO-002 Ankle Prosthesis. (Image courtesy of DoD Center for the Intrepid)
The system is built with a hardware component, the physical wearable device tethered to offboard actuators, and a software component (using MATLAB/Simulink and Speedgoat) that control the actuator in real time by regulating the force and motion applied to the user via the wearable device.
Out of the box, the system includes everything a researcher needs to get up and running the same day it’s delivered. This allows researchers to focus on what’s interesting and groundbreaking to them, without having to reengineer the subsystem components for their specific experiments or research goals.
FINDING THE RIGHT TOOLS
Caplex is the first robotic emulator of its kind to become commercially available, opening new doors into the development and use of wearable machines. It’s being used to drive discovery across multiple different fields and industries, including the design and prescription of prosthetic devices, rehabilitation, augmentation and injury prevention, and pure biomechanics research, for example.
And its success to date hinges on its innovative platform. The core technology originates from Carnegie Mellon University, where Humotech got its start. Informed by his PhD work there, Josh created Humotech with the goal of making robotic emulation more accessible to anyone who wants to use it and essentially productizing it. No small feat, the company understood early on that Caplex’s commercial viability lies not just in its proprietary robust, high-performance technology, but also in its scalability for future development and its usability to customers with diverse research needs in the field of wearable robotics.
Finding the right tools was pivotal to bringing Caplex to market. Like many engineers, Josh was already familiar with MATLAB and Simulink tools during his time at Carnegie Mellon University, making it a natural decision to try out the tools for the development of Caplex.
It was in these early development days Josh also found, Speedgoat. The small startup was one of the first to apply Speedgoat for rapid prototyping of real-time control systems for robotics, using the functionality for control, I/O, and signal processing.
Original code for reading instruments with standard Caplex (Speedgoat IO101 and IO317 cards). (Image courtesy of Humotech)
“MATLAB/Simulink and Speedgoat are a natural fit for Caplex,” says Josh. For one, the built-in functionality of the tools makes them ideal for engineers, who might not be software engineers, in the field of wearable robotics. “The great thing about these tools is that you don’t have to code common basic functionality for robotics/automation from scratch, giving you a head start on whatever you want to develop. We wanted to utilize what was already there from MathWorks and Speedgoat, and extend this for developers of wearable robotics, exoskeletons, and prosthetics,” says Josh.
INNOVATION AND ITERATIONS
As a nimble team whose first office location was in Josh’s garage, the company is familiar with challenges that many startups face and making the most of their resources. Upon entering the MathWorks Startup Program the team was able to access low-cost licensing and engineering support to maximize their focus on development. “If we didn’t have access to the startup program at the beginning it would have been really challenging to get going,” recalls Carl Curran, Director of Engineering.
After success with the initial laboratory-based Caplex system, the Humotech team set its sights on a new portable version of the platform. that would enable customers to take their R&D outside of the lab for experimentation overground in unstructured and/or real-world environments.

Portable Caplex System worn outdoors in the backpack configuration. (Image courtesy of Humotech)
Developing the portable system was not without its challenges, but the scalability of MathWorks and Speedgoat tools made this much easier than it could have been, notes Ryan. The team needed to adapt the existing code to the portable system, while still maintaining the code’s compatibility with the standard system, and avoid trying to reinvent the wheel. As Josh describes the task, “we wanted to do everything we were doing with the big system but in a much tinier package, without making things too complicated or expensive for us or our customers.” Humotech adapted its existing code base to run on a much smaller Speedgoat Real-Time machine, host PC, and industrial servomotor & drive — plus the system was integrated into a wearable backpack with onboard battery power.

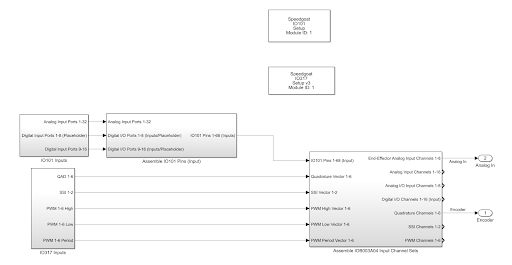
New code added for reading instruments with portable Caplex (Speedgoat IO397 card). (Image courtesy of Humotech)
Using MathWorks variant subsystem feature, the team was able to isolate the software components that change from the components that don’t between the standard and new portable system, and package those parts in variant subsystems. This ability to flip control standard to control portable allows users to easily change code in MATLAB and both systems can run the same software.
TOGETHER, PUSHING THE LIMITS OF THE POSSIBLE
As Humotech looks toward the coming years, their mission continues to help their customers push the boundaries and discover new ways of researching and developing life-changing wearable machines — prosthetics, exoskeletons, and beyond. The synergistic relationship between MathWorks, Speedgoat, Humotech, and the Caplex user base is key to making this mission a reality.
Establishing a good dynamic between Humotech and MathWorks and Speedgoat’s knowledgeable, responsive support teams – as well as their extensive documentation – has played an important role in helping Humotech figure out solutions to tough engineering challenges. Humotech, MathWorks, and Speedgoat all regularly collaborate on addressing Caplex users’ questions and expansions to the platform.
“The way we see it, it’s this kind of partnership that is driving change in the field of wearable devices,” says Josh. “MathWorks and Speedgoat are enabling Humotech to build the wearable robotics platform of the future, and Humotech is helping to expand the range of applications for MathWorks and Speedgoat technologies.”
Eric Parker who supports startup companies at MathWorks has been working with Humotech since their inception in the program. “Startups never cease to amaze me with their efforts to change the world. I have been able to watch Humotech evolve over the years and their commitment to helping people live better lives is inspiring.”
Beyond supporting the ever-growing breadth of applications Caplex users are exploring, immediate plans include more rapid syncing with MATLAB/Simulink version releases, streamlining the code base with approaches such as object-oriented programming, and adapting the platform to be compatible with the new Humotech-supported Open Source Leg.
“It’s exciting to be a part of an ambitious young company like Humotech, the technology is fascinating and we’re addressing a need for people with disabilities and injuries in a fundamentally new way,” says Gabriel Forsythe y Korzeniewicz, Vice President of Growth. It is this passion, the mix of engineering with enabling people to keep moving, that continues to drive the team. Humotech’s ultimate goal is to create a future where orthotics, prosthetics, and other wearable machines are developed in an evidence-based, systematic way using tools like Caplex.
Hear more from the team at Humotech in this month’s startup short!






コメント
コメントを残すには、ここ をクリックして MathWorks アカウントにサインインするか新しい MathWorks アカウントを作成します。