
Autonomous Navigation with Brian Douglas, Part 1: Introduction
How do robots and autonomous vehicles navigate in different environments? We collaborated with Brian Douglas to help you find it out. Brian is a technical content creator with YouTube videos on Control System Lectures. His content is very helpful for engineering students. In fact, I have watched some of his videos to refresh on control theory during my master’s program.
In this blog series, we’ll cover a lot of topics that I think will be pretty interesting for those who are looking to learn about the concepts, challenges and requirements for autonomous navigation. Here’s what you can look forward to:
- Introduction to Autonomous Navigation
- Localization and Particle Filter
- Simultaneous Localization and Mapping (SLAM)
- Path Planning, It’s types and Algorithms
- Extended Object Tracking
- Metrics and Verification
Do you prefer visuals over bulleted lists? Here is a glimpse of what these posts will include. And then, let’s roll it over to Brian to start with the first post of the series!
 Hi, I’m Brian Douglas and welcome to the Autonomous Navigation blog!
Hi, I’m Brian Douglas and welcome to the Autonomous Navigation blog!
This blog will follow along with the Autonomous Navigation Tech Talk series from MathWorks. You can think of this as a written companion to those videos … or those videos as an animated companion to this blog. I suppose it’s however you want to look at it!
The goal of this blog and the videos are to introduce some topics within Autonomous Navigation. I want to build up some intuition for each of the concepts we cover rather than go too deep into the mathematics. The hope is that with this gentle introduction you’ll be in a better position to understand what the math is doing, and hopefully, be more motivated to learn it from other, more rigorous resources. I provide links to many of those resources throughout the posts. Now let’s begin with the introduction to Autonomous Navigation (link to the animated companion).
Navigation is the ability to determine and control your movement in a way that gets you from your current location to some destination.
At a high level, I think autonomous navigation can be pretty intuitive because humans have a lot of experience navigating in their day-to-day lives. When you travel somewhere, whether you walk, bike, or drive you are doing some amount of navigation. You are using your senses to determine where you are, where you want to be, and how to get there – you are determining your location and controlling your movement to get to a destination.
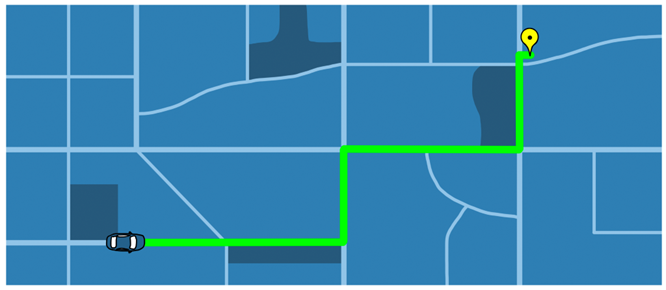
Let’s take the simple act of driving to the store. By knowing where you are and where the store is within a map of the neighborhood you can plan which roads to take, and by adjusting the steering wheel and pedals you can get the car to follow that plan.
While driving, you’re constantly observing your environment with your eyes and ears and complementing the simple 2D road map with a much fuller mental model of the local space. You’re able to interpret the information you gather as other cars, stop signs, speed limits, and anything else that would cause you to have to adjust the finer details of your planned path.
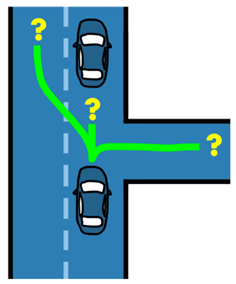
For example, if you approach a slower car, you can determine whether to slow down and stay behind them, speed up and pass them, or take an entirely different route. Once you make your choice, you then act on it by accelerating and steering the vehicle in a way that follows the new path you’ve chosen.
Autonomous navigation is doing exactly this, but without a human in the loop. Instead of a person, a vehicle is autonomously performing the necessary steps to navigate. Broadly speaking, an autonomous vehicle can determine its location, develop a plan, and move through an environment to reach a destination all on its own.
When I say autonomous vehicle, I mean any kind of mobile machine. These are things like:
 A car autonomously traveling down a road |
 A UAV autonomously delivering packages |
|
 A rover autonomously journeying other planets |
 A submersible autonomously exploring the depths of the ocean |
In summary, we learnt the definition of autonomous navigation. In the next blog, we will learn about different types of autonomy and approaches to achieve full autonomy.
Here is a detailed list of content planned for this blog series, where you will find each post linked when it is published. But we request you to follow this blog page to get a notification when a new post is available. We would love to see your comments on which one of these are you most excited to see.
- Introduction to Autonomous Navigation
- The Capabilities of Autonomous Navigation Systems
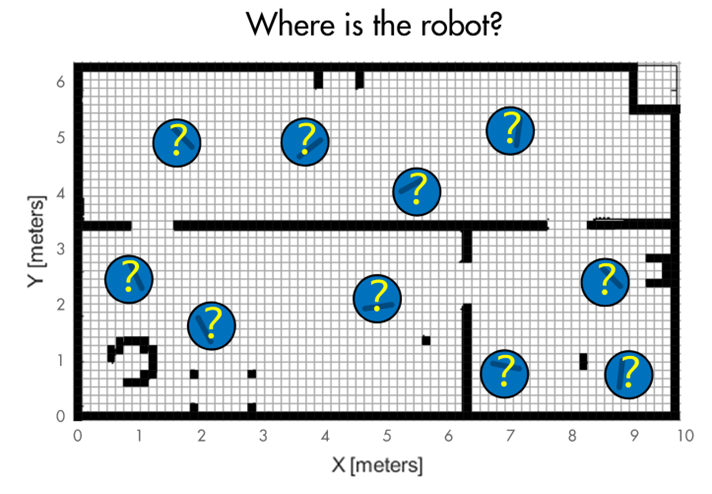
- Where am I? (The Localization Problem)
- Intuition Behind the Particle Filter
- A Particle Filter for Localization
- Introduction to Simultaneous Localization and Mapping (SLAM)
- Pose Graph Optimization
- Introduction to Path Planning
- Search-Based Planning Methods
- Sampling-Based Planning Methods
- Introduction to Extended Object Tracking
- Partitioning and Clustering
- The Intuition Behind Multi-Hypothesis Trackers
- How Do We Know Autonomous Navigation Systems Will Work?
- Planning Algorithm Metrics
- Tracking Algorithm Metrics
- Verifying an Autonomous Navigation System
Thank you and see you with the next post!
- Category:
- Autonomous Navigation with Brian Douglas







Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.