
What has one leg, hops like a pogo stick, and could someday replace Tigger at Disney?
Nothing could really replace Tigger! But Disney did create a one-legged robot that could possibly challenge Tigger in a bouncing contest. This pogobot weighs less than 5 pounds, is about 12 inches in height and can bounce, untethered, for up to 19 bounces. It’s an autonomous, untethered, bouncing robot, and it’s the first of its kind.

Image credit: Disney
The robot
The robot is comprised of a spring actuated leg and lightweight body. The design was revealed last week by Disney Research, and is detailed in this paper, “Untethered One-Legged Hopping in 3D Using Linear Elastic Actuator in Parallel (LEAP).”
The body of the robot makes up only about two-thirds of the robot’s total weight. This ratio is considerably lower than most “hopper” robot torsos and therefore enables the robot to be powered by Lithium Polymer (LiP) batteries instead of the typical power cable. (The wires seen in the above image were used for data collection purposes, and are not needed for locomotion. They do not provide power to the robot.)
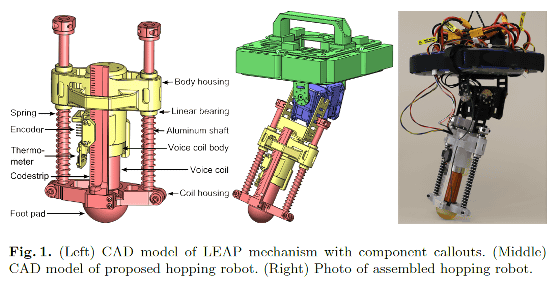
Image credit: Disney Research.
In addition to the lightweight LiP batteries, the torso is comprised of inertial sensors and a microcomputer. The sensors estimate velocity, and the microcomputer uses a modified Raibert hopping algorithm to maintain the robot’s balance.
The leg of the robot utilizes two compression springs to support the majority of the weight, and a voice coil actuator as the spring mechanism. The voice coil actuator is the type of coil found in common audio speakers. These components comprise the LEAP mechanism detailed in the research paper.
The role of simulation in robot design
Simulation played a critical role in the design of this system. The project by Zachary Batts, Joohyung Kim, and Katsu Yamane began as a computer simulation before it was implemented in hardware. A CAD model was imported into Simscape Multibody to create the model.
According to the research team, “We first developed a simulation to test, tune, and debug our state estimator and controller before implementing on hardware. To determine an optimal spring stiffness that maximizes hopping height, we simulated our system with a range of stiffnesses, assuming a range of damping coefficients (0%, 5% and 10% critical damping).”
The team performed hardware experiments to identify system parameters and validate the electromechanical model. This included calibrating the current sensor, identifying the breakaway stiction force of the linear bearings, and testing the hardware with various spring stiffnesses. Through these tests, they identified relevant system parameters and showed that the original model captured the general behavior of the physical system.
Will you see this robot hopping around Disney World?
Disney Research’s mission is to “push the scientific and technological forefront of innovation at The Walt Disney Company.” While it isn’t likely that you will see this robot at Disney World anytime soon, when the research team described the motivation behind their research they said legged robots “can overcome uneven terrain, and can entertain an audience as they act out complex movements.”
The one-legged robot can serve as a simplified testbed for locomotion control algorithms, they also have to withstand significant force actuation to achieve safe ground clearance. For the researchers, this pogobot will provide “an ideal benchmark for actuators used in legged locomotion.”
To learn more about this project, check out this video of the robot.






コメント
コメントを残すには、ここ をクリックして MathWorks アカウントにサインインするか新しい MathWorks アカウントを作成します。