 Cleve’s Corner: Cleve Moler on Mathematics and Computing
Cleve’s Corner: Cleve Moler on Mathematics and Computing The MATLAB Blog
The MATLAB Blog Guy on Simulink
Guy on Simulink MATLAB Community
MATLAB Community Artificial Intelligence
Artificial Intelligence Developer Zone
Developer Zone Stuart’s MATLAB Videos
Stuart’s MATLAB Videos Behind the Headlines
Behind the Headlines File Exchange Pick of the Week
File Exchange Pick of the Week Hans on IoT
Hans on IoT Student Lounge
Student Lounge MATLAB ユーザーコミュニティー
MATLAB ユーザーコミュニティー Startups, Accelerators, & Entrepreneurs
Startups, Accelerators, & Entrepreneurs Autonomous Systems
Autonomous Systems Quantitative Finance
Quantitative Finance MATLAB Graphics and App Building
MATLAB Graphics and App Building

This post is from Peter Corke, a professor, researcher, teacher and writer about robotics and robotic vision.
The journey
My journey into robotics began in the mid 1980s and I learnt… read more >>
Convert Deep Learning Models between PyTorch, TensorFlow, and MATLAB
Example of Using the Profiler to Help Reduce the Execution Time of a Function
Three favorites from TIME Magazine’s “Best Innovations of 2023”
An interview with MATLAB playground: Build your IoT Analysis and Plots for ThingSpeak
MathWorks Training: Aligning development goals and team skills to enhance startup success
This post is from Peter Corke, a professor, researcher, teacher and writer about robotics and robotic vision.
The journey
My journey into robotics began in the mid 1980s and I learnt… read more >>

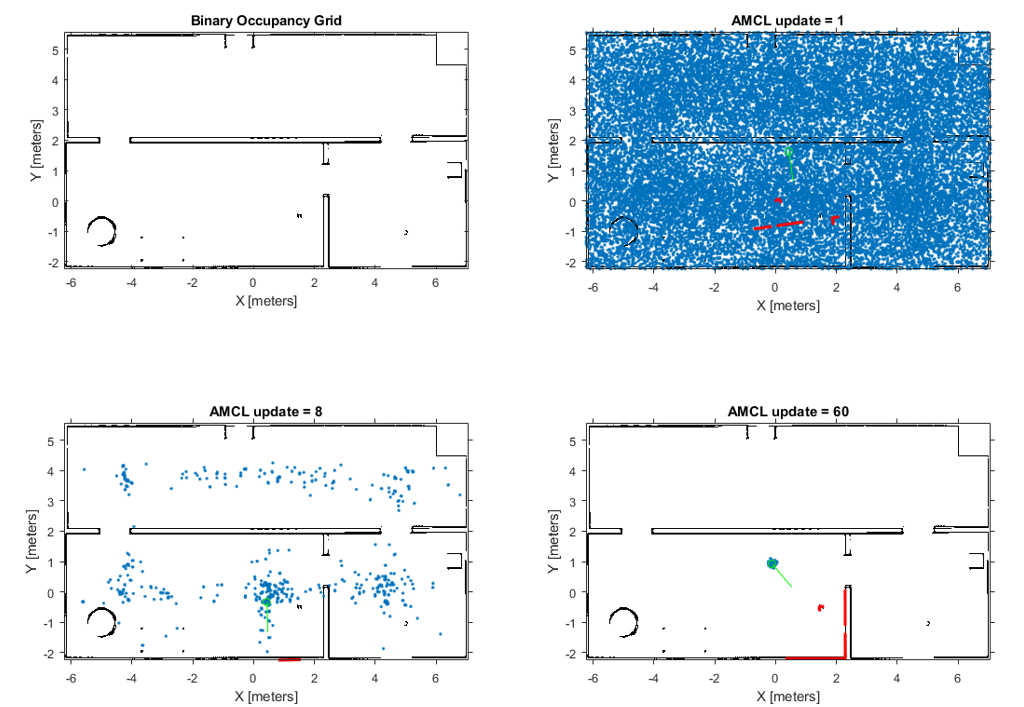
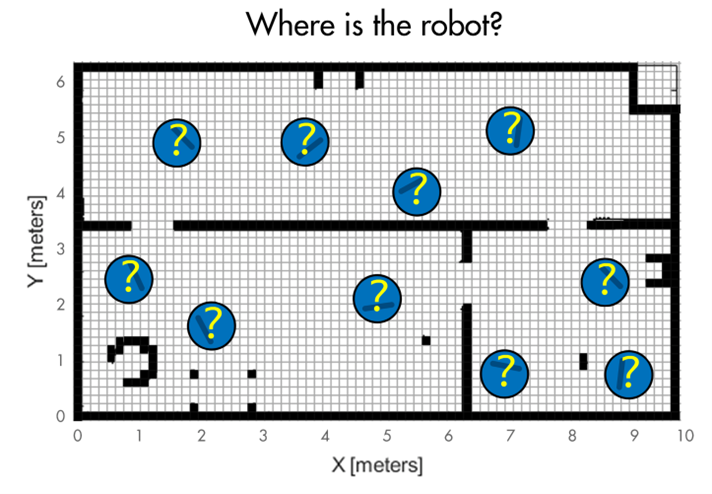
Autonomous Navigation with Brian Douglas: Part 5
This post is from Brian Douglas, YouTube content creator for Control Systems and Autonomous Applications.
In the previous post, we learnt what is… read more >>
Autonomous Navigation with Brian Douglas: Part 4
This post is from Brian Douglas, YouTube content creator for Control Systems and Autonomous Applications.
In the previous post, I talked about the… read more >>
Autonomous Navigation with Brian Douglas: Part 3
This post is from Brian Douglas, YouTube content creator for Control Systems and Autonomous Applications.
In the last post, we learnt about the… read more >>
What is autonomous navigation? we learnt that in the last post of this blog series. In this one, Brian will talk about different types of autonomy and the approaches we can take to achieve full… read more >>
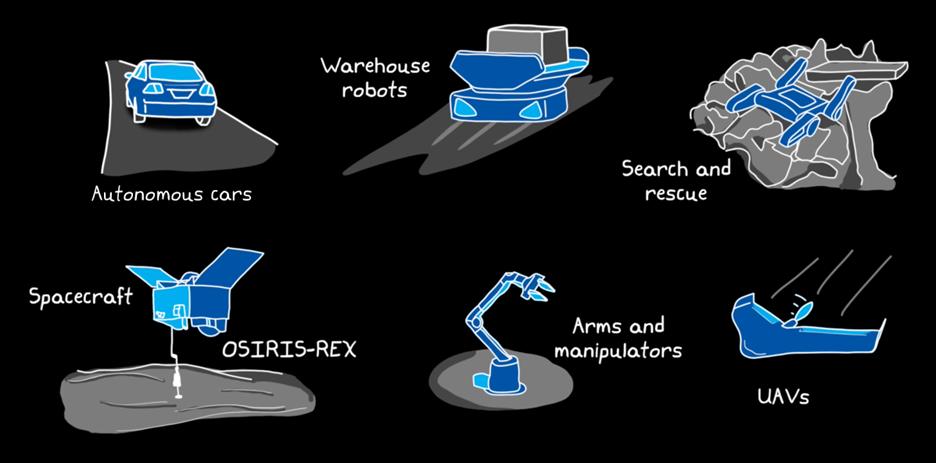
How do robots and autonomous vehicles navigate in different environments? We collaborated with Brian Douglas to help you find it out. Brian is a technical content creator with YouTube videos on… read more >>

With robots delivering packages, driverless robo-taxis showing up for the rides and humans co-working with machines, we are imagining to add autonomy in almost all the repetitive tasks and focusing… read more >>
These postings are the author's and don't necessarily represent the opinions of MathWorks.