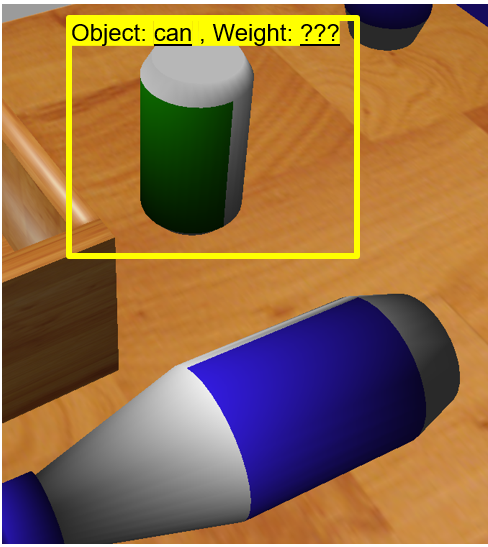
In today’s post, Jose Avendano joins us to talk about a perception algorithm developed specifically for robot manipulators to determine the weight of grasped objects. Over to you, Jose..
Robot… 続きを読む >>

In today’s post, Jose Avendano joins us to talk about a perception algorithm developed specifically for robot manipulators to determine the weight of grasped objects. Over to you, Jose..
Robot… 続きを読む >>


In today’s post, Maitreyee Mordekar would like to introduce you to Team DJS Robocon from D. J. Sanghvi College of Engineering, Mumbai, India.
Introduction
Building a robot is not a simple… 続きを読む >>

For this week’s blog post we have invited a VEX University team from the Technical University of Altamira in Mexico to share their journey towards becoming a national finalist for the VEX U Robotics… 続きを読む >>
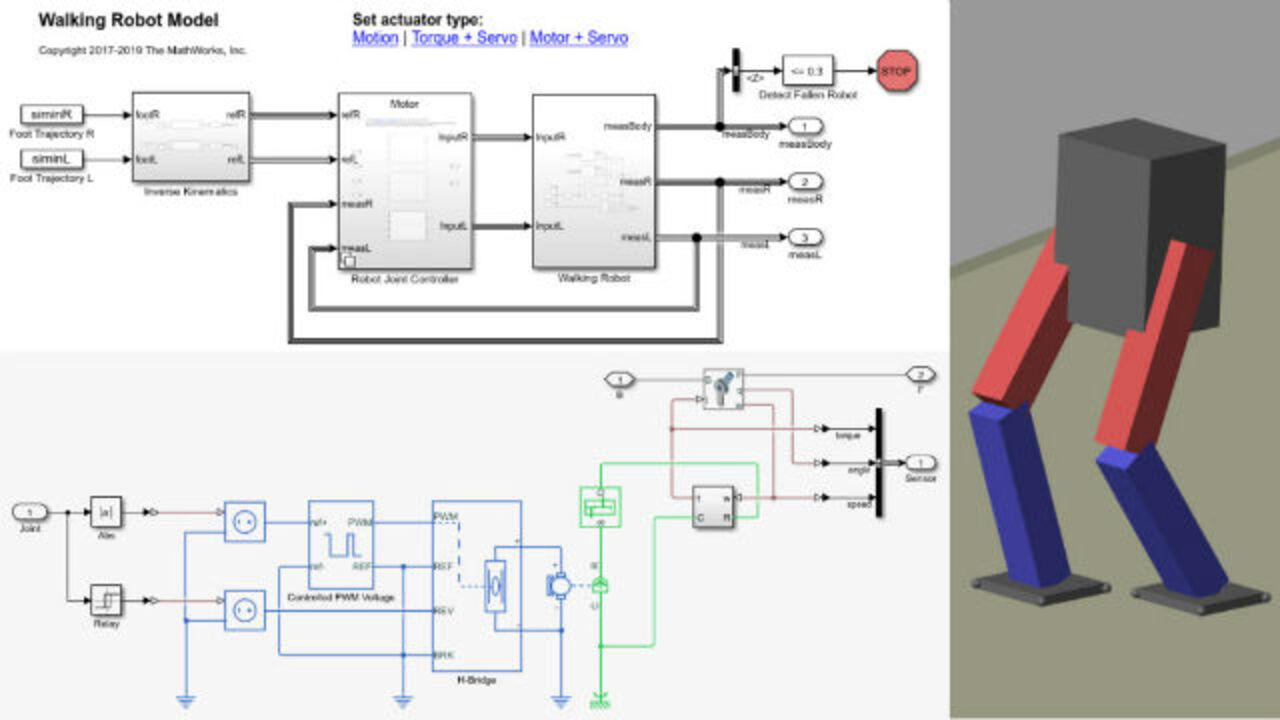
In this post, I will discuss robot modeling and simulation with Simulink®, Simscape™, and Simscape Multibody™. To put things in context, I will walk you through a walking robot example (get… 続きを読む >>
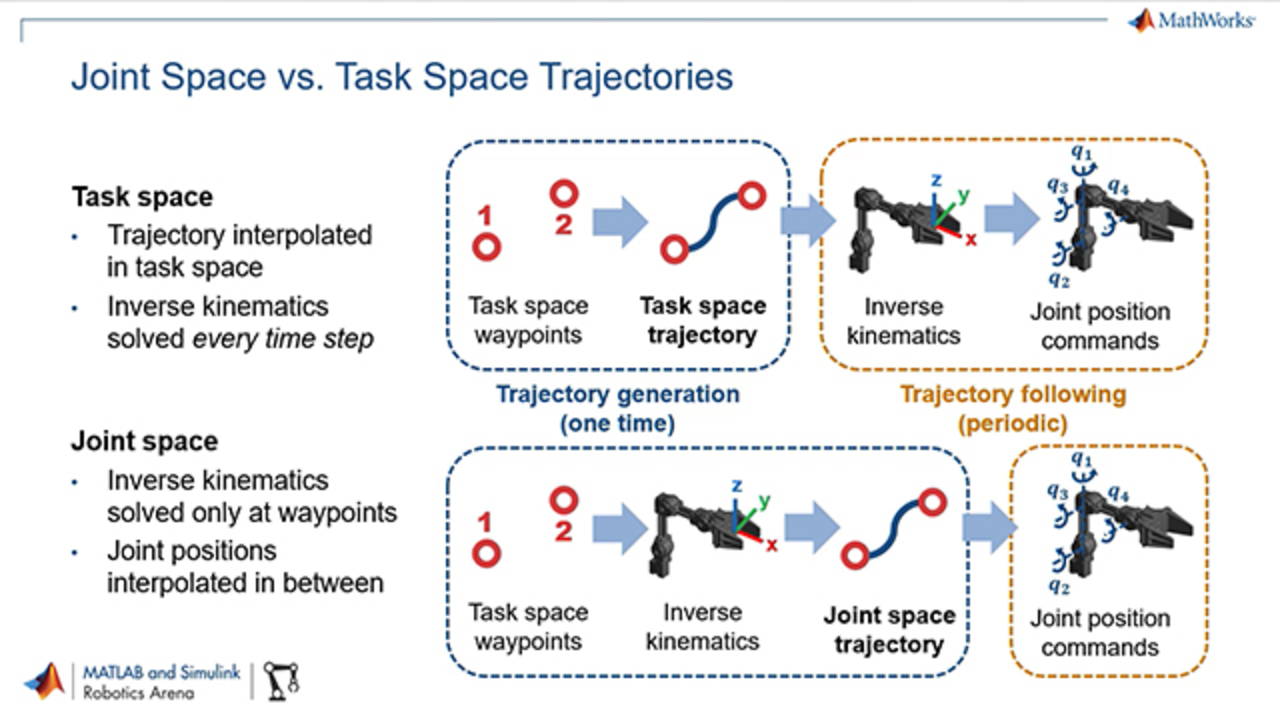
NOTE: While this post will talk specifically about manipulators, many of the concepts discussed apply to other types of systems such as self-driving cars and unmanned aerial vehicles.
Trajectory… 続きを読む >>

For today’s post, I would like to introduce you to Team Automatons from Pimpri Chinchwad College of Engineering, Pune. They recently scored 2nd in the MathWorks Modelling Award at the National… 続きを読む >>
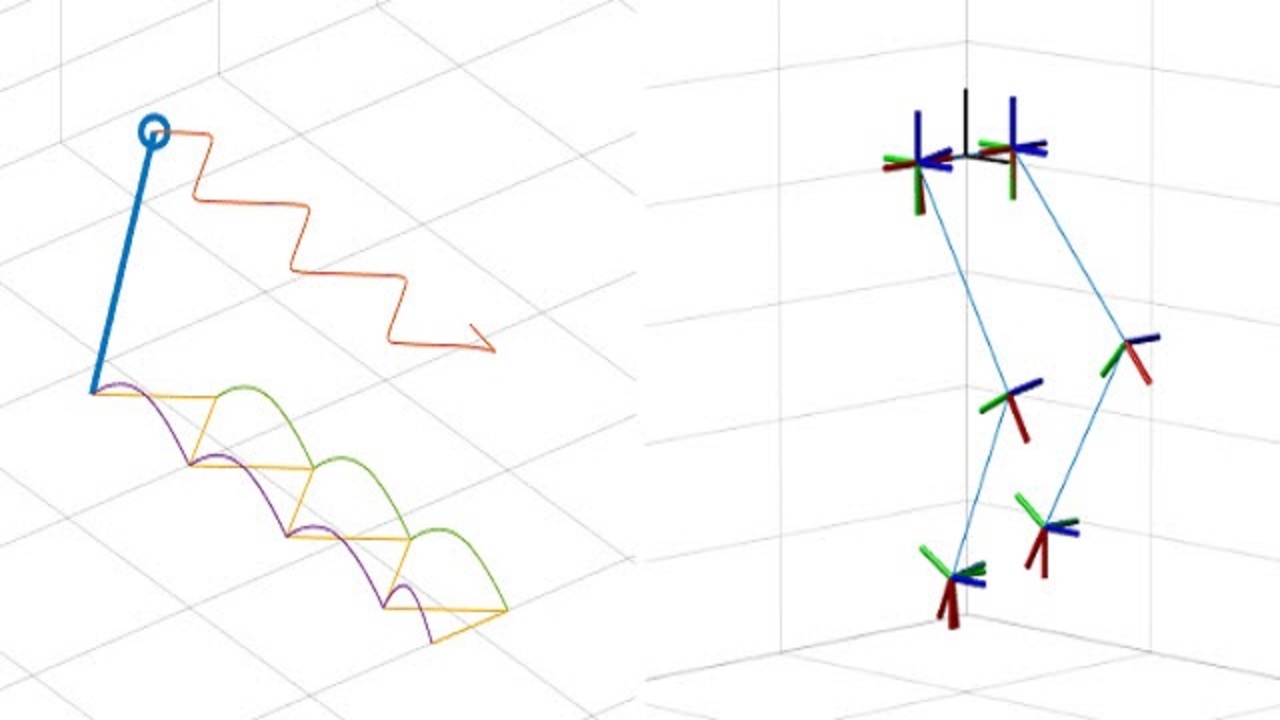
In a previous blog post, I described the modeling and left off with a high-level discussion on how you would implement controllers once you had a model built.
In this post, we will dig down into the… 続きを読む >>

The Racing Lounge is back from Christmas break. I wish you all a succesful and healthy 2018!
In today’s post, Sebastian Castro discusses his experiences with a robotics workshop he helped… 続きを読む >>
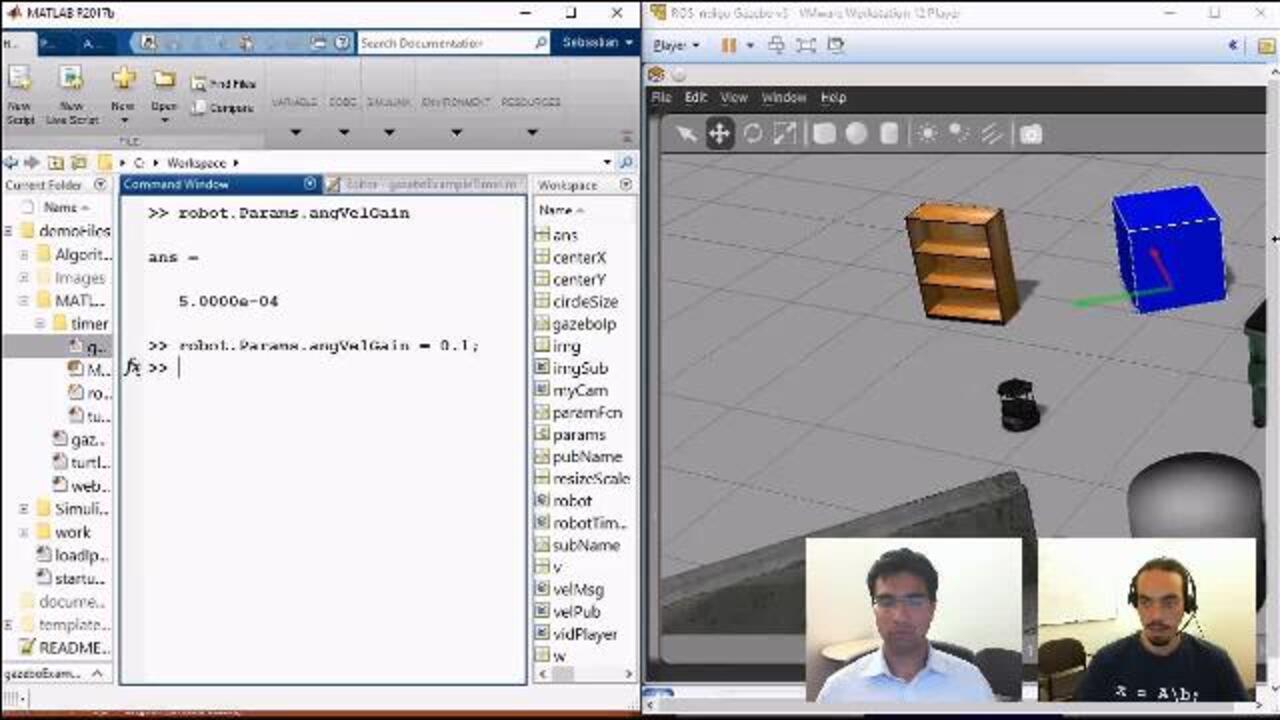
Sebastian Castro is back to talk about the basics of connecting MATLAB and Simulink with the Robot Operating System (ROS).
NOTE: As of R2015a, Robotics System Toolbox equipped MATLAB and Simulink… 続きを読む >>