
モデルベースデザインでEVバッテリーシステム性能を最適化
お久しぶりです。MathWorksの飯島です。
今回はMathWorksの海外公式サイトに掲載中の事例記事を日本語で紹介させていただきます。
ミラノ工科大学のFormula SAEチーム「Dynamis PRC」が、SimulinkやSimscape Batteryを使って電動フォーミュラカーのバッテリーシステムをどう開発・改善していったか、という内容です。モデルベースデザインがどんなふうに役立ったのか、実際の取り組みがすごくリアルに書かれていて、学生フォーミュラに関わってる人や、学生フォーミュラに参加しているチームや電動車両に興味ある人には特におすすめです。(今回参考にした元のMathWorksの公式記事はこちらです: Driving Formula SAE Success with Model-Based Design)
「シミュレーションに基づくアプローチのおかげで、車両を安全動作限界により近づけることができ、レースエンジニアにもシステム挙動の理解を深めてもらうことができました。最終的にこれは車両性能の向上に大きく貢献し、昨年の大会ではイタリア国内で学生チーム最上位になる助けとなりました。」
— Matteo Geraci(ミラノ工科大学)
毎年、世界中の大学の学生チームがFormula SAE Electricに参加します。これは、高性能な電気自動車を設計、製作、そしてレースすることを競う国際的な技術者の競技会です。競技は学習やイノベーションのための体系的な環境を提供しますが、技術的課題は決して単なる「机上の問題」ではありません。エネルギー効率の最大化からドライバーの安全確保まで、学生たちが取り組む課題は、実際の自動車開発におけるものと変わりません。
ミラノ工科大学の私たちのFormula SAEチーム「Dynamis PRC」にとっても、バッテリー性能は車両性能全体を左右する極めて重要な要素です(図1)。電気自動車業界の多くのエンジニアと同様に、私たちはエネルギー使用を最適化し、熱負荷を管理し、厳格な安全・性能制限を守らなければなりません。例えば競技の重要な制約として、バッテリーシステムの出力は80 kWに制限されています。この制限は、高速レースや夏場の長時間の熱ストレスといった要求と相まって、瞬間的かつ長期的な出力を管理できる高度なバッテリーマネジメントシステム(BMS)を必要とします。しかしBMSアルゴリズムの開発は、特にバッテリーシステムの正確なモデルがないチームにとって大きな課題です。
図1. コーンで区切られたサーキットを走行テスト中のDynamis PRC Formula SAE車両

私たちはMATLAB®、Simulink®、Simscape Battery™を用いたモデルベースデザインのワークフローを活用して、こうした課題に取り組みました。バッテリーシステムの詳細な電気的・熱的モデルを開発することで、その動作特性をより深く理解し、車載BMSに実装した出力制限アルゴリズムを改善できました。このアルゴリズムは規定出力上限を超えないように一歩先を予測して必要電力を推定するだけでなく、耐久レース中の熱条件も考慮します。
シミュレーションに基づくアプローチによって、安全動作限界に近づけつつ、レースエンジニアにシステム挙動をより良く理解してもらうことができました。最終的にこの取り組みは車両性能向上に大きく貢献し、昨年の大会ではイタリア国内の学生チームでトップの成績を収めることができました。
動機と方法論
Dynamis PRCのBMS開発における目標は、車両のバッテリーシステム(Formula SAEでは「アキュムレータ」と呼びます)の性能を最大化することにあります。主な目的は、SOC(State of Charge、充電状態)を含むアキュムレータの状態を監視・管理することで、出力とエネルギー効率を直接制御することです。
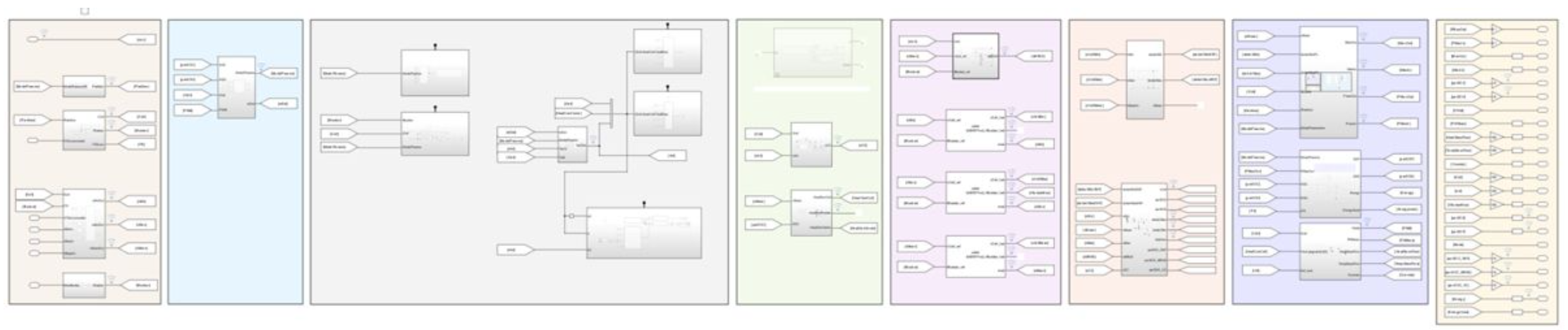
BMSの2つの核心的要素は、いずれもモデルベースデザインを使って開発されたものであり、バッテリーシステムの状態推定を行う適応型拡張カルマンフィルタ(AEKF)と、リアルタイムで動作し、性能を犠牲にすることなく安全でルールに定められた範囲内で車両を運用可能にするパワーリミッタです
図2. パワーリミッタを含むBMSモデルの概要
私たちは、体系的なミクロからマクロへのアプローチに従っています。まず正確なセルモデルの開発から始め、その後、バッテリーシステム全体およびその熱的特性のモデリングへと進みます。モデリングのプロセスは、物理的なテストによるデータ収集、その後のモデルのパラメータ化と検証を含みます。SimulinkにおけるAEKFおよびパワーリミッティングアルゴリズムの開発は、私たちが実施するモデリングとシミュレーションによって支えられています。
セルモデルの作成、パラメータ化、検証
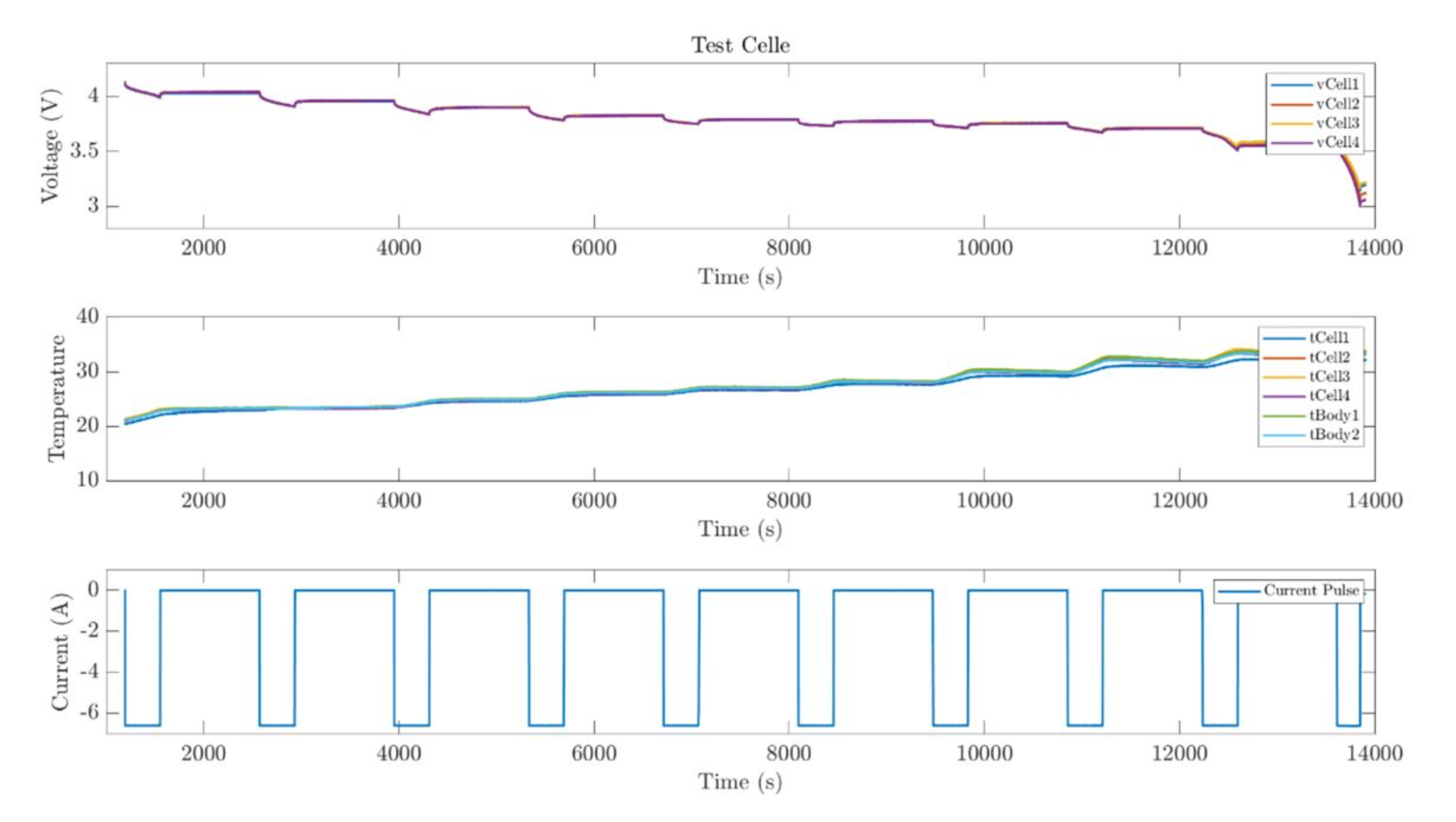
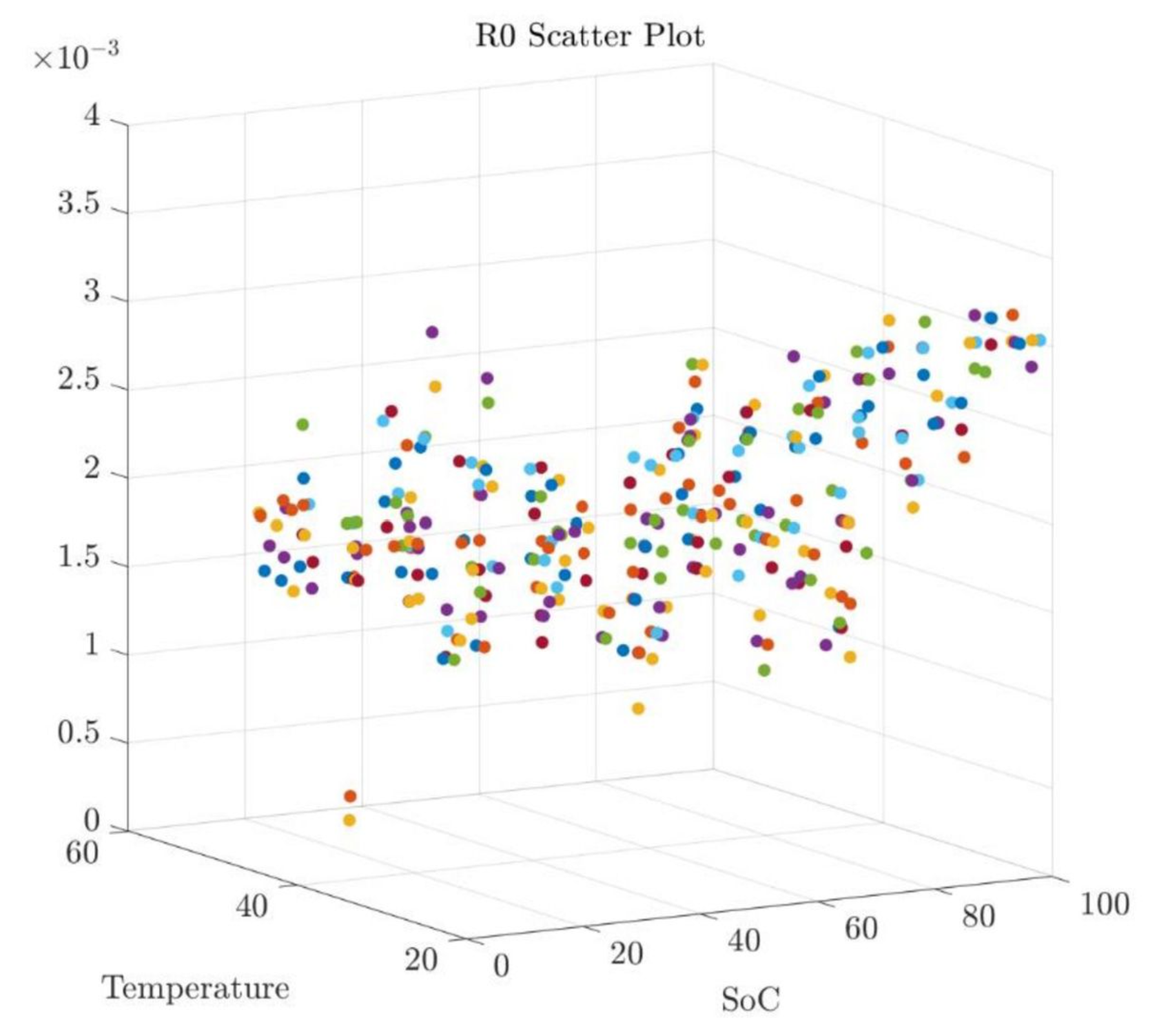
代表的なセルモデルを開発するため、オープン回路電圧試験やHPPC(Hybrid Pulse Power Characterization)試験などを様々な温度で実施しデータを収集しました(図3)。その後、MATLABでデータをクリーニング、分析、可視化しました。これにより、瞬間的な直列抵抗R₀が温度やSOCによってどのように変化するかを把握できました(図4)。
図3. HPPC試験中の電圧と温度のプロット
図4. 温度とSOCによるR₀の変動を示す散布図
次に、私たちは2つの回路モデリング手法を検討しました:より単純な1ポールモデルと、より表現力豊かな2ポールモデルです。後者は2つの抵抗-コンデンサ(RC)ペアを含んでおり、動的な忠実度が著しく優れていました。Optimization Toolbox™ を使用して、時間領域データを指数関数的減衰関数にフィットさせ、2ポール構成における R₁、R₂、τ₁、および τ₂(ここで τ = RC)を抽出しました。指数フィッティングの結果は、2ポールモデルの方がより正確であることを明確に示していたため、今後のシミュレーションの基礎としてこのモデルを選択しました。
その後、Curve Fitting Toolbox™ を使って、温度とSOCの関数としての R₀ の平滑化された3次元曲面フィットを作成し、同様に R₁、R₂、τ₁、τ₂ についても同様の曲面を作成しました(図5)。これらの平滑化された曲面は後に、Simscape™ モデルおよび AEKF 内でルックアップテーブル(LUT)として使用され、さまざまな動作条件におけるモデルパラメータの効率的なリアルタイム推定を可能にしました。
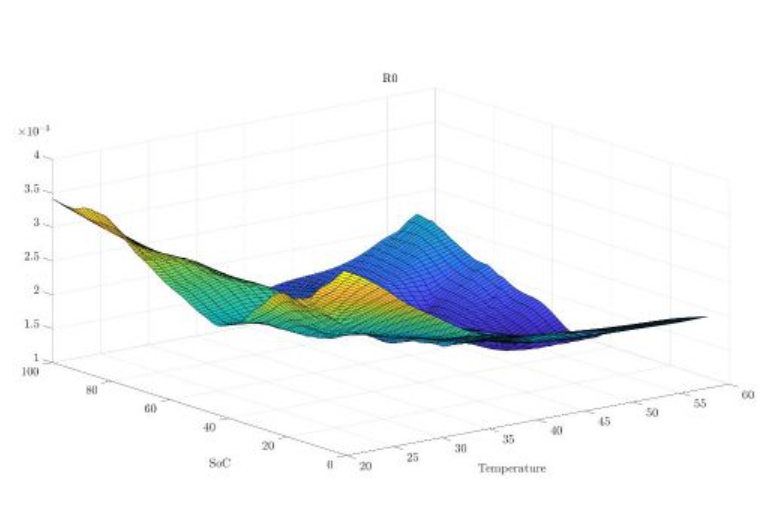
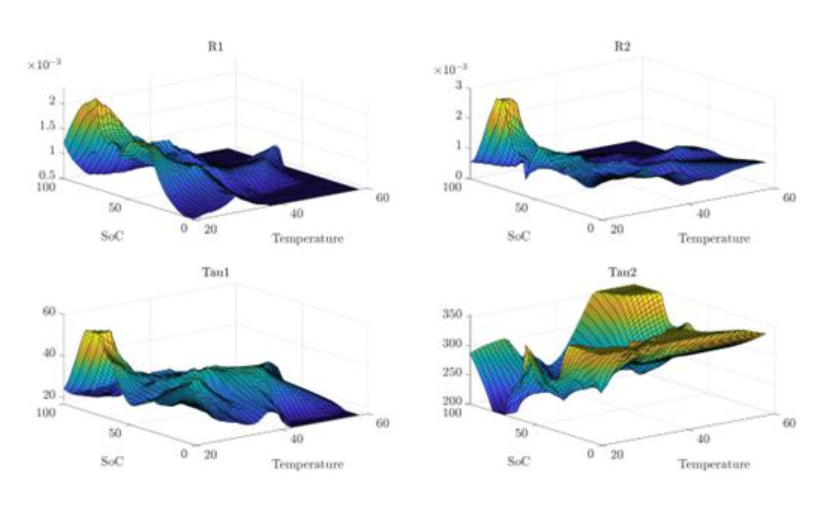
図5. R₀、R₁、R₂、τ₁、τ₂の温度・SOC依存性を示す3D曲面
私たちは、フィッティング段階で生成したルックアップテーブルから引き出したモデルパラメータを用いて、Simulink内で検証を行いました。オープンループシミュレーションでは、電流を唯一の入力として使用し、電圧のシミュレーション出力をHPPCテストデータと直接比較しました。モデルは高い精度を示し、平均電圧誤差はわずか4.5 mV(0.1%)でした。この誤差のほとんどはシミュレーションの終盤で発生しており、おそらくモデルがセルの容量をわずかに過小評価していたため、低SOCで小さな電圧のドリフトが生じたものと考えられます(図6)。
図6. HPPC試験の実測電圧とシミュレーション電圧の比較
SimscapeとSimscape Batteryによるバッテリーシステムのモデリング
セルレベルでの特性評価をフルのバッテリーシステムモデルへ拡張するために、私たちはSimscapeおよびSimscape Batteryを使用して、バッテリーパック内の全720セルにわたる電気的および熱的挙動をモデル化しました。これらのセルは、144セルを直列に接続したものが5つ並列に接続された構成になっています。
720セルすべてを個別にシミュレーションするのは計算負荷が大きすぎるため、私たちは5つの並列ブランチのうちの1つの直列ブランチに注目し、電流分布の非対称性から生じる主要な非理想性を取り込みました。この非理想な挙動は、バスバーや接続部分の抵抗によって、5つのブランチ間で電流の分担が不均一になることに起因します。特に、バッテリーシステムの端子コネクタに物理的に最も近い第1ブランチは、その位置とバスバーの抵抗のためにより大きな電圧降下を経験します。私たちは、このブランチがシミュレーション上最も重要であると特定しました。というのも、パワーリミッティングアルゴリズムでは、電流に対するセル電圧を予測してセルの電圧安全限界(2–4.25V)を超えないようにすることが重要だからです。基本的に、このブランチのSOC推定がパワーリミッティングアルゴリズムの基準となり、電圧降下のために5つの中で最悪の性能を表すからです。
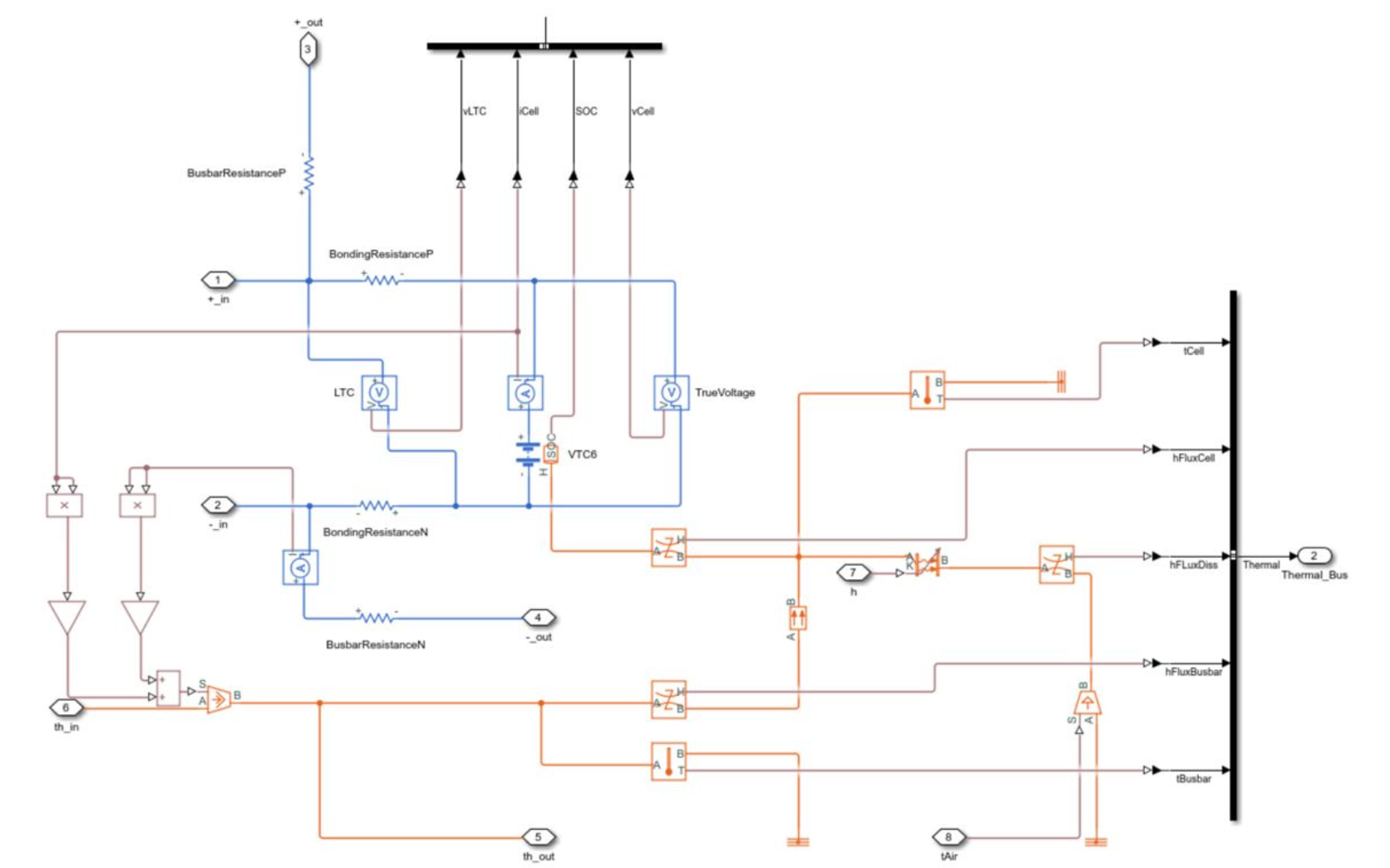
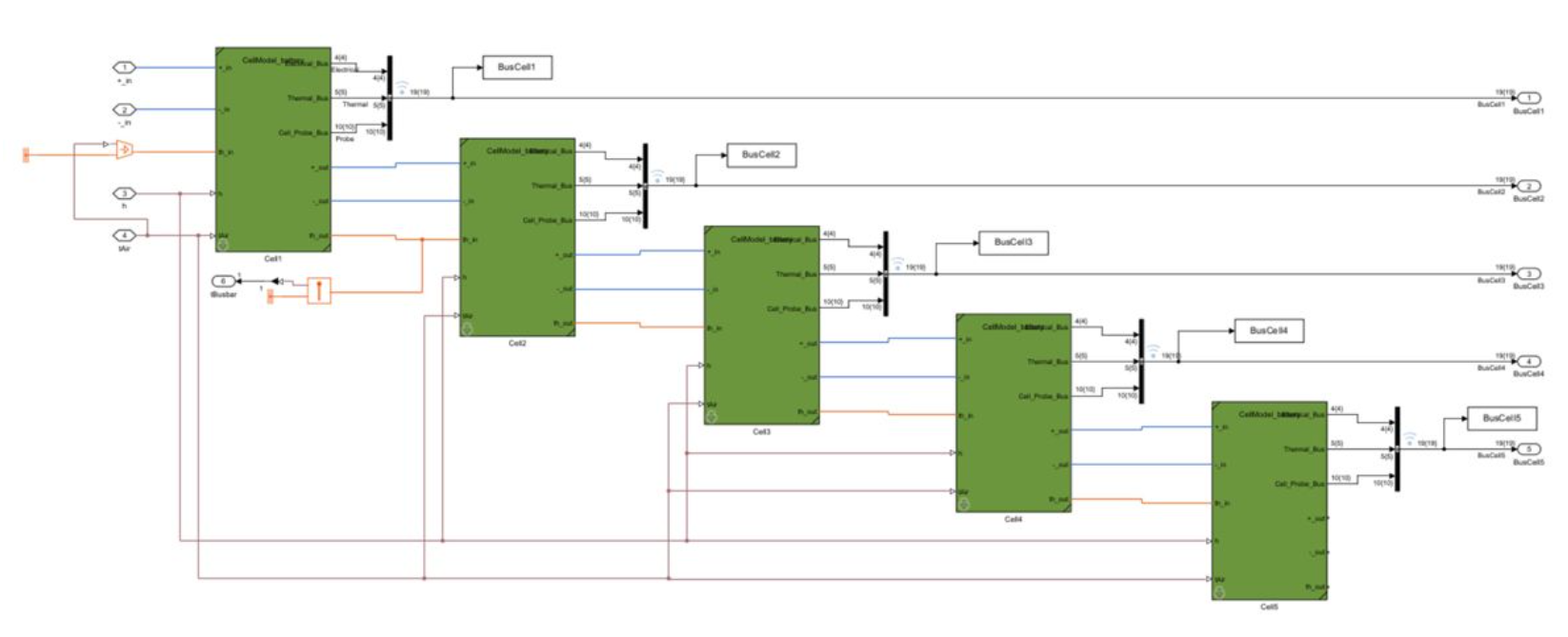
Simscapeを使って作業を進める中で、私たちはバッテリーパック全体の電気的および熱的特性を同時にシミュレーション可能なモデルを開発しました。まず、温度とSOC依存の値を表す以前のフィッティング作業から得たルックアップテーブルを組み込んだ、144セルの直列ブランチ全体を表現するCellModel_batteryブロックを作成しました(図7)。次に、これらのブランチレベルのブロックを5つ組み合わせて、完全な並列構成を表現しました(図8)
図7. 1並列ブランチの電気・熱特性をシミュレートするSimscapeモデル
図8. 5並列ブランチを含むバッテリーパック全体の電気・熱モデル
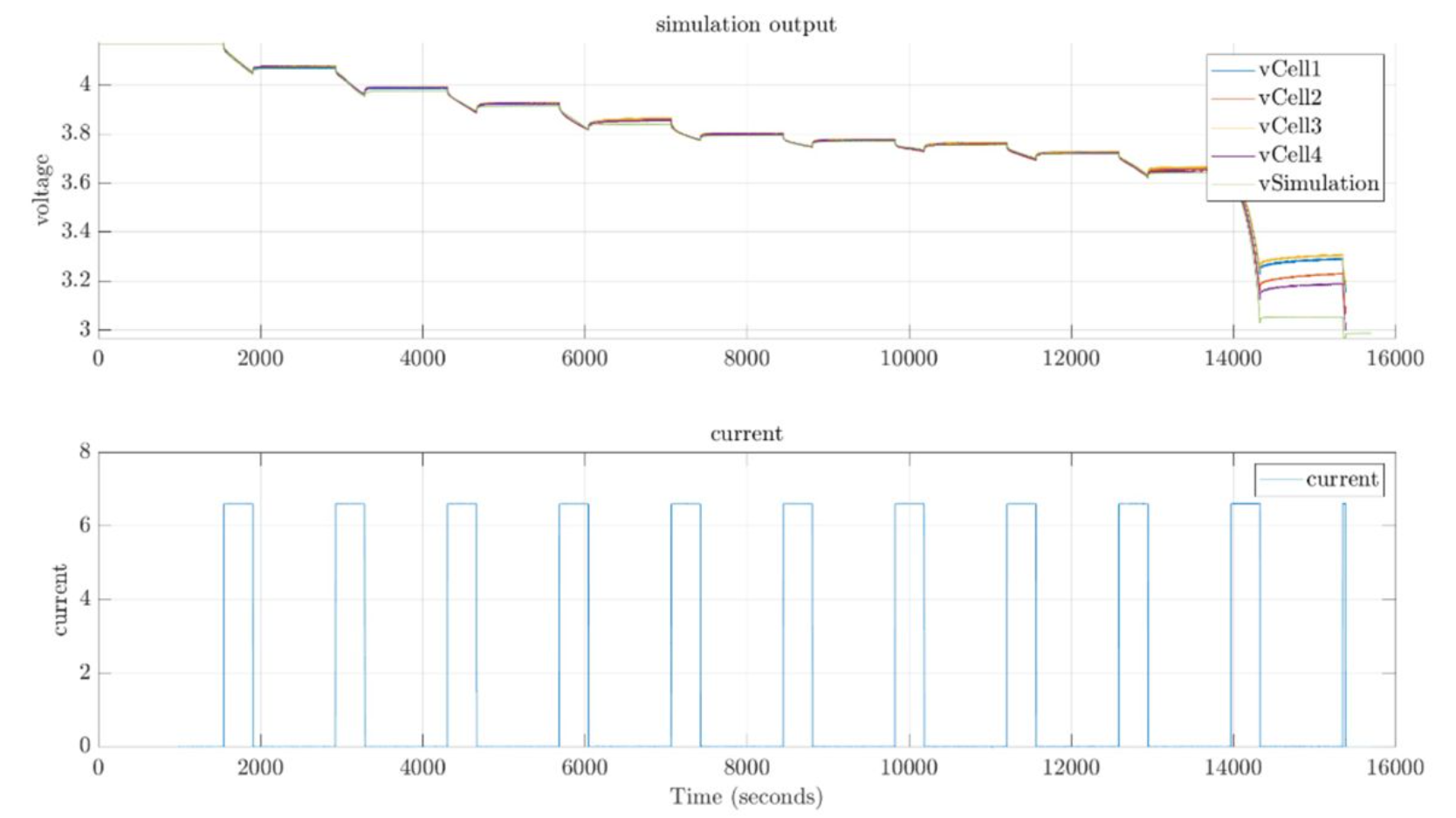
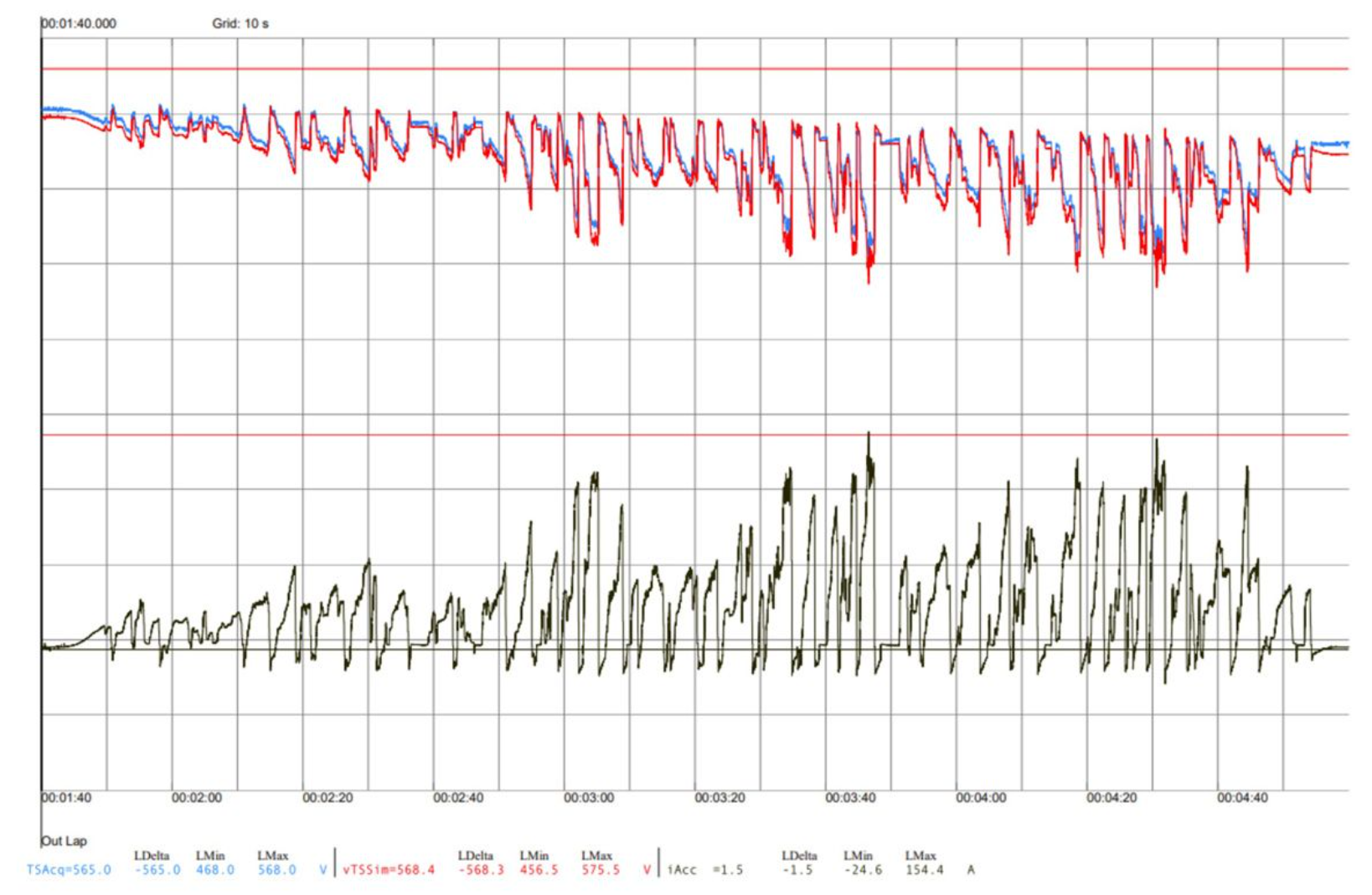
このモデリングアプローチによって、バッテリーシステム内の不均一な電流分布と、それが電圧ダイナミクスに与える影響を深く理解できました。特に最もストレスの大きいブランチでの挙動がよく観察できました。また、このモデルを実車でのオートクロス走行試験のデータと比較したところ、高い精度で一致しました(図9)。さらに、冷却要件やブランチ間の熱結合に関する重要な洞察も得られました。
図9. オンボード走行試験での実測電圧(青)とシミュレーション電圧(赤)の比較。電流変動(黒)に応じた挙動を再現
AEKFとパワーリミッタの実装と展開
高忠実度のSimscapeモデルは、バッテリーシステムの動的挙動を理解し特性化するのを助け、初期の設計および検証段階で深い洞察を得る上で重要な役割を果たしました。車両のSTM32マイクロコントローラ上でパワーリミッターアルゴリズムを実装するためには、電力使用を管理する上で重要な入力であるSOCを推定する、より計算効率の良いソリューションが必要でした。Simulinkを使って、私たちはSimscapeモデルに基づく簡約化状態空間モデルを開発し、組み込み実装用にAEKFとして実装しました。この簡約化モデルを検証するために、より複雑なSimscapeモデルからのSOC推定と比較し、その差が許容範囲内であることを確認しました。
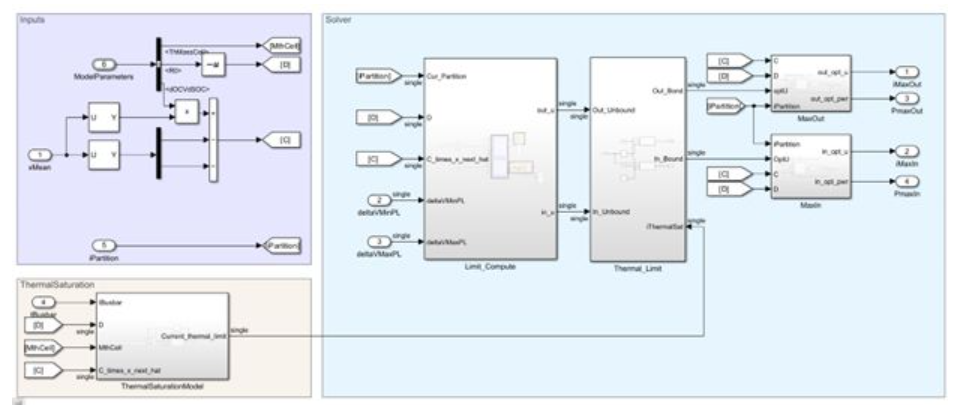
Simulinkで作業を続け、SOC推定、熱制限(最大60 °C)、および競技規則に基づいて最大許容電力を制約するパワーリミッティングアルゴリズムを開発しました(図10)。
図10. Simulink上のパワーリミッタモデル
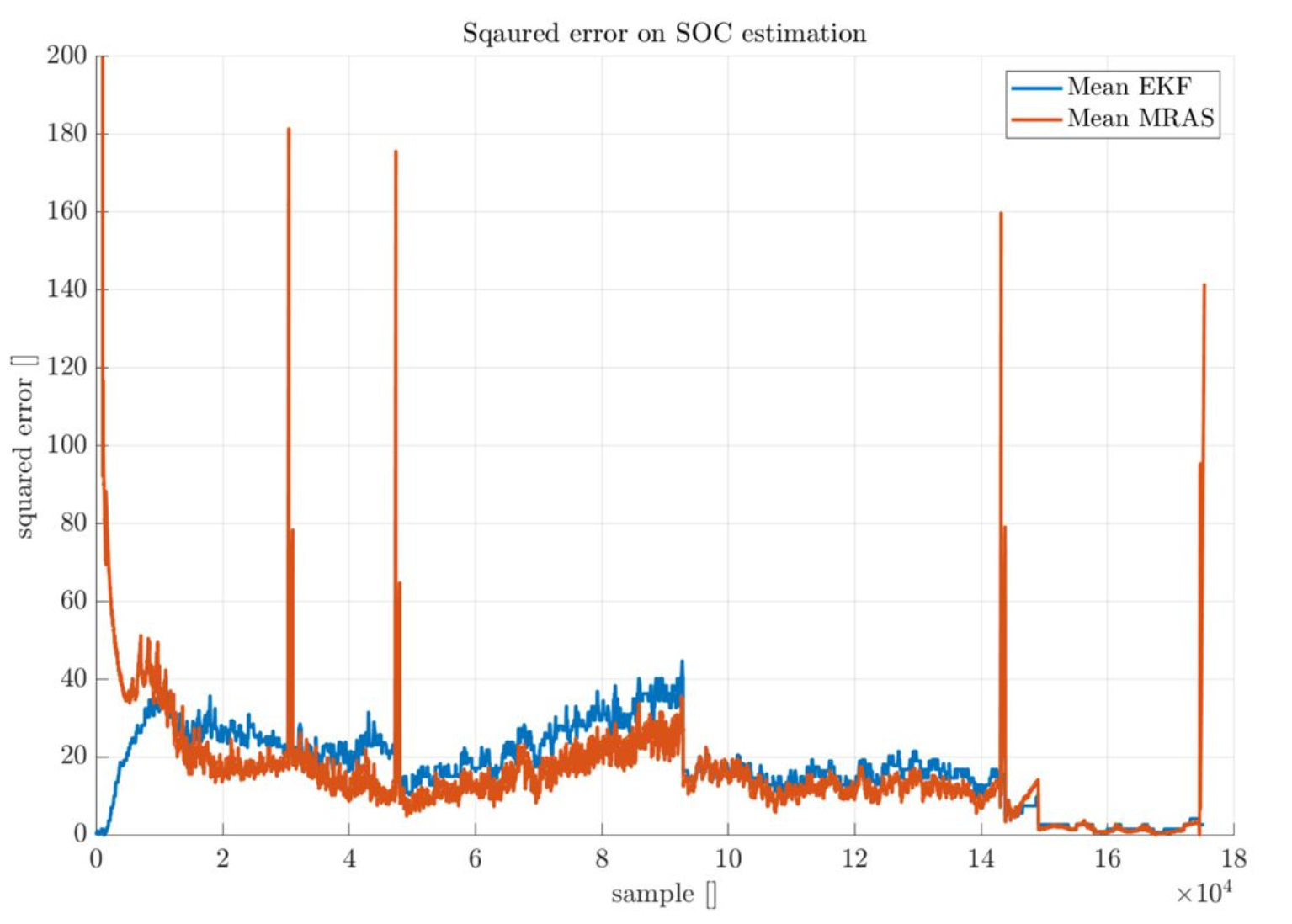
以前は、モデル参照適応システム(MRAS)アルゴリズムに基づくものを含む、より初歩的な手法を使用しており、これは最近の耐久レースで問題を引き起こしていました。AEKFは、MRASアルゴリズムで見られた大きな誤差スパイクなしに、より滑らかなSOC推定を提供しました(図11)。私たちは、AEKFとパワーリミッターの両モデルの機能と統合を検証するために、クローズドループシミュレーションを実行しました。
図11. EKF(青)とMRAS(赤)のSOC推定誤差の二乗誤差比較
モデルを検証後、Embedded Coder®を使ってSTM32マイコン用のCコードを生成しました。当初の実装ではRAMを約75%、ROMを約20%消費していましたが、データ型をdouble(64ビット)からsingle(32ビット)に変更、ルックアップテーブルの簡略化、Simulinkのコード生成オプション調整などの最適化を行い、最終的にはRAM使用率を2%未満、ROM使用率を3%未満に抑えました。最適化したコードを車両のマイコンにデプロイし、実際の走行条件下での大規模なオンボードテストを行いました。
Model-Based Designで切り開く未来
MATLABとSimulinkによるモデルベースデザインは、私たちのバッテリーシステム開発の全フェーズで中心的な役割を果たしました。セル単体の実験データ解析、Simscapeでの精密なセルモデル作成、パック全体の電気・熱挙動シミュレーション、そして最終的なパワーリミッタアルゴリズムの実装と展開に至るまで、すべてを支えました。
過去には、精度の低いSOC推定手法の制約から、レースエンジニアはより保守的な走行戦略を取らざるを得ず、パフォーマンスが抑えられていました。しかし今年は、検証済みのバッテリーモデルと信頼性の高い最適化された出力制限アルゴリズムによって、より自信を持って性能限界に近づける走行が可能になりました。これによりレース成績が向上しただけでなく、バッテリーシステムが実走行条件下でどう振る舞うかをより深く理解できるようになりました。
そして、Dynamis PRCチームの中には卒業するメンバーもいますが、残るメンバーはこの基盤の上にさらに改良を重ね、モデルを洗練させ、アルゴリズムを強化し、年を追うごとに車両からより高い性能を引き出し続けています。
- Category:
- ユーザー紹介


Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.