
MathWorks began partnering with the World Robot Olympiad (WRO) last season (2025) to support student teams using modeling and simulation as part of their robotics workflows. As part of this… read more >>

MathWorks began partnering with the World Robot Olympiad (WRO) last season (2025) to support student teams using modeling and simulation as part of their robotics workflows. As part of this… read more >>

Introduction: Why These Skills Matter
Engineering today is a dynamic, fast-moving field. Whether you’re designing autonomous vehicles, aerospace systems, or renewable energy solutions, one truth… read more >>

Every year, outstanding graduate students from fields such as electronics, communications, computer science, and integrated circuits gather at the China Graduate Electronics Design Competition… read more >>

In today’s blog, we have Tanmay Bora and Saumitra Kulkarni from Team BRACT’s Vishwakarma Institute of Technology, Pune, India. The team won the MathWorks Modeling Award at the DD ROBOCON India 2025… read more >>
Today’s guest blogger is Kathy Zhang, who will be sharing her conversation with the winning team from NACME’s 2025 National Virtual Bridge Engineering Design Challenge. The team was made up of… read more >>
For today’s post, Roberto Valenti, who leads the MathWorks Challenge Projects program, will introduce the winners of the 2025 Artificial Intelligence Challenge. Over to you, Roberto..
Artificial… read more >>

Today we’re talking to Matthew Brun, an M3 Challenge alum who competed in 2017 and 2018. After earning his BA in Operations Research from Rice University in 2022, Matthew is now pursuing his PhD in… read more >>

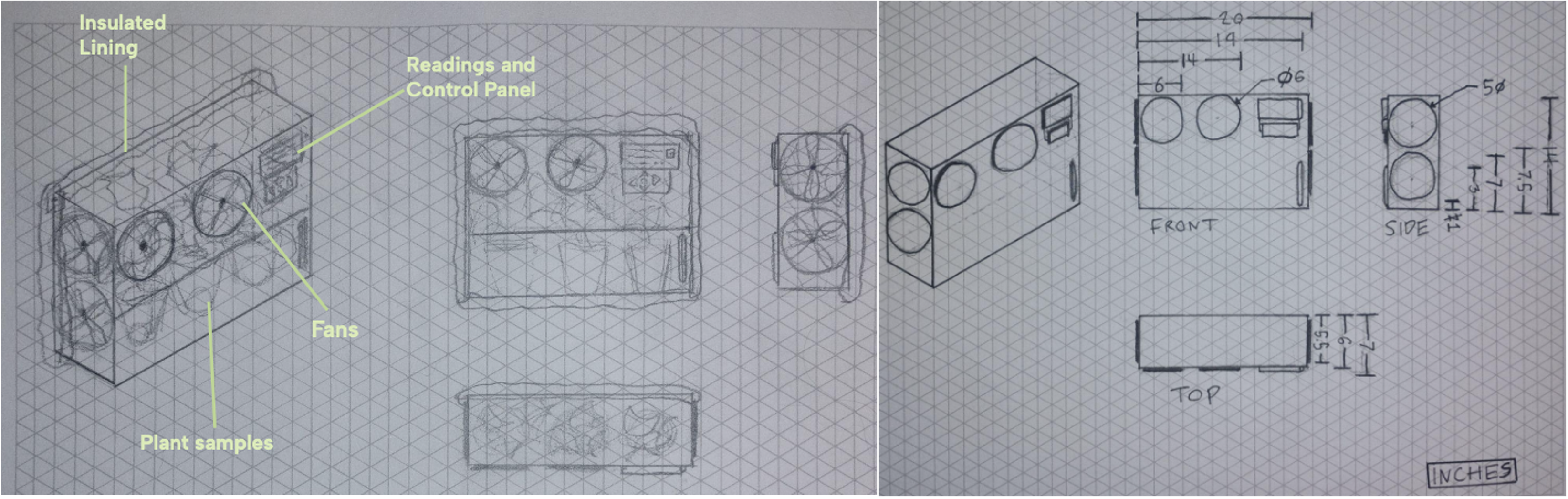
Today’s guest bloggers are students from the University of the Witwatersrand (Wits), Johannesburg. They took on the Wits Mechatronics MATLAB and Simulink Challenge, designing a control system for a… read more >>

Today we are joined by guest bloggers Yijie Wang and Sarah Xu from the University of Toronto’s SAE AutoDrive team.
aUToronto is the University of Toronto’s self-driving car team, bringing… read more >>

Today’s guest blogger is Khushin Lakhara, who is on the Student Programs team at MathWorks supporting aerospace competitions. Over to you, Khushin!
Table of Contents
Introduction
Collecting… read more >>
These postings are the author's and don't necessarily represent the opinions of MathWorks.