 Cleve’s Corner: Cleve Moler on Mathematics and Computing
Cleve’s Corner: Cleve Moler on Mathematics and Computing The MATLAB Blog
The MATLAB Blog Guy on Simulink
Guy on Simulink MATLAB Community
MATLAB Community Artificial Intelligence
Artificial Intelligence Developer Zone
Developer Zone Stuart’s MATLAB Videos
Stuart’s MATLAB Videos Behind the Headlines
Behind the Headlines File Exchange Pick of the Week
File Exchange Pick of the Week Hans on IoT
Hans on IoT Student Lounge
Student Lounge MATLAB ユーザーコミュニティー
MATLAB ユーザーコミュニティー Startups, Accelerators, & Entrepreneurs
Startups, Accelerators, & Entrepreneurs Autonomous Systems
Autonomous Systems Quantitative Finance
Quantitative Finance MATLAB Graphics and App Building
MATLAB Graphics and App Building
Visualizing the floating-point behavior of the point-on-line test
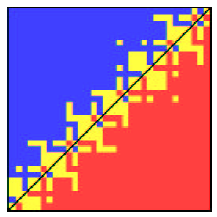
Today's post is about this picture, which is from the paper "Classroom Examples of Robustness Problems in Geometric Computations," by L. Kettner, K. Mehlhorn, S. Pion, S. Schirra, and C. Yap, Computational Geometry, vol. 40, n. 1, May 2008, pp. 61-78.
Yes, I know, I was supposed to do another follow-up on my Cody problem of eliminating unnecessary polygon vertices. But I really am following up on the Cody problem, if a bit indirectly.
I was looking at solution 108897 by Cris, and I paused over these lines:
v1 = p2-p1;
v2 = p3-p2;
if ( v1(1)*v2(2) == v1(2)*v2(1) ) && any(v1.*v2>0)
I recognized the expression ( v1(1)*v2(2) == v1(2)*v2(1) ) as a way to see if the point p2 is on the line segment formed by p1 and p3. It reminded me of Loren's 06-Jun-2008 blog post on methods for determining collinearity, and it also reminded me of the paper above.
I decided to see if I could reproduce the figure in MATLAB.
The figure concerns the behavior of floating-point methods for computing the planar orientation predicate. Given three points $p$, $q$, and $r$ in a plane, does the point $r$ lie to the left of the line through $p$ and $q$, to the right of that line, or on the line? One way to compute this is via the equation
$$O(p,q,r) = \mbox{sign}((q_x - p_x)(r_y - p_y) - (q_y - p_y)(r_x - p_x))$$
The figure in the paper represents an experiment using $q=(12,12)$, $r=(24,24)$, and $256^2$ different locations for the point $p$, all of which are extremely close to the point $p=(0.5,0.5)$. More specifically, the figure is a visualization of $O((p_x+xu, p_y+yu),q,r)$ for $0 \leq x,y \leq 255$ and $u=2^{-53}$. This value of $u$ is the increment between adjacent double-precision floating-point numbers in the interval $0.5 < x \leq 1$.
Here's a straightforward implementation of the orientation equation above.
function out = floatOrient(p,q,r)
out = sign((q(1) - p(1))*(r(2) - p(2)) - ...
(q(2) - p(2))*(r(1) - p(1)));
Let's see what we get when we compute the orientation for all those different point locations $p'$ that are extremely close to $(0.5,0.5)$.
[m,n] = meshgrid(0:255); Px = 0.5 + n*eps(0.5); Py = 0.5 + m*eps(0.5); q = [12 12]; r = [24 24]; out = zeros(size(Px)); for u = 1:256 for v = 1:256 out(u,v) = floatOrient([Px(u,v), Py(u,v)], q, r); end end
(Yes, I know ... floatOrient and the calling code above can all be vectorized.)
I'll show in yellow the locations $p'$ where $r$ has been determined to be on the line containing $p'$ and $q$. I'll use blue and red to show where $r$ has been determined to lie on one side or the other of the line.
image(out + 2); axis equal; set(gca,'ydir','normal') axis off colormap([0 0 1; 1 1 0; 1 0 0]) hold on plot([.5 256.5],[.5 256.6],'k','LineWidth',3) hold off
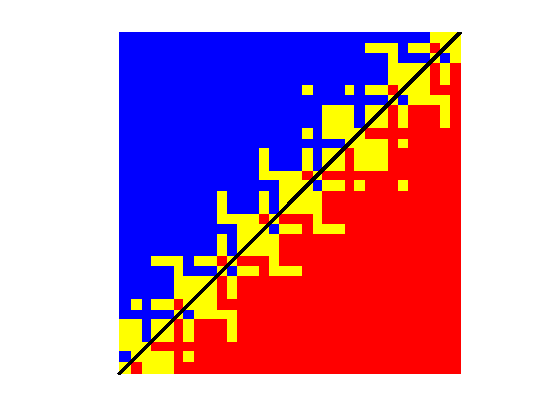
How do we interpret this? First, I want to emphasize that this matrix represents the results for $p'$ that are all extremely close to $(0.5,0.5)$. The lower left corner corresponds exactly to the $(0.5,0.5)$, while the upper right corner corresponds to approximately $(0.500000000000028,0.500000000000028)$. Ideally, only the results lying along the black line should be yellow; these are the locations where $p'$, $q$, and $r$ are collinear. Our floating-point computation method is showing many other locations in yellow. Notice also that a few pairs of locations $p'$ are actually being computed reversed. A left turn has been determined to be a right turn, and vice versa.
In the comment thread on Loren's collinearity post, Tim Davis suggested using a rank test to determine collinearity. It looks something like this:
function out = rankCollinear(p,q,r)
out = rank([p-q ; q-r]) < 2;
Let's see how this test does on our collection of points.
for u = 1:256 for v = 1:256 out(u,v) = rankCollinear([Px(u,v), Py(u,v)], q, r); end end image(out + 1); axis equal; set(gca,'ydir','normal') axis off colormap([0 0 0; 1 1 0]) hold on plot([.5 256.5],[.5 256.6],'k','LineWidth',3) hold off
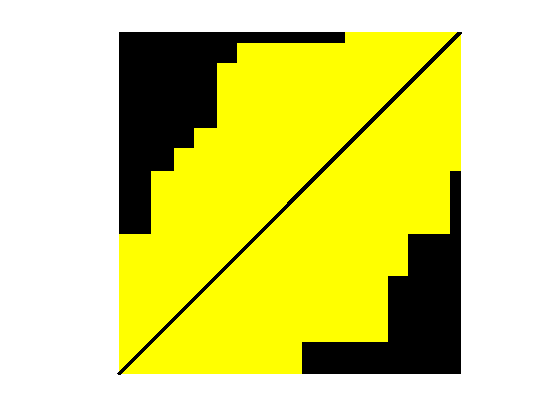
We only see yellow pixels, not red and blue, because rankCollinear only checks for collinearity, not the left or right turning of noncollinear points. The width of the section of yellow pixels depends on the numerical tolerance used by the rank function.
I am fascinated by this particular experiment and visualization. It reminds me once again that seemingly straightforward geometric ideas can be devilishly difficult to implement with a computer program.







Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.