
High School Students Tackle Mobility Challenges with an Award-winning Innovative Engineering Solution
Welcome to our blog post! Today, we have the pleasure of introducing our guest blogger who will be sharing an exciting project called the HANDIWHEEL. This project was developed by a team of talented students from Louis Armand High School in Nogent-sur-Marne, France. Let’s dive into their remarkable journey and explore the innovative aspects of their award-winning creation.
What is the HANDIWHEEL project?
The HANDIWHEEL project is a remarkable endeavor that focuses on engineering and mobility. The team aimed to design a scaled-down prototype of a wheelchair capable of overcoming obstacles, particularly curbs several centimeters in height. This project not only showcases the students’ technical skills but also their dedication to making a positive impact on the lives of individuals with mobility challenges (as an illustration, refer to the article in the French News). By developing this innovative solution, the team strives to enhance accessibility and empower those with mobility limitations to navigate their surroundings with greater ease and independence.
How did the team develop the idea of the deployable wheel and how did they bring it to reality?
The team recognized the importance of overcoming sidewalks and curbs for wheelchair users. Inspired by this challenge, they conceptualized the idea of deployable front wheels. By utilizing a system of deployable wheels controlled by a servo motor, they devised a kinematic mechanism with 10 pivot joints. This ingenious solution allowed the front wheels to increase their diameters, enabling them to conquer obstacles effectively.
What tools did the teams use to go from concept to design?
To transform their concept into a tangible design, the team employed various tools and methodologies. They utilized CAD models and prototypes created at the school’s FabLab, utilizing 3D printing for the plastic parts and laser cutting for the wooden side walls. Additionally, they adopted the Model-Based Design (MBD) approach, leveraging Simulink, Stateflow and Simscape to develop models for motor control, sensor information management, control the robot movements and for sizing its energy autonomy.
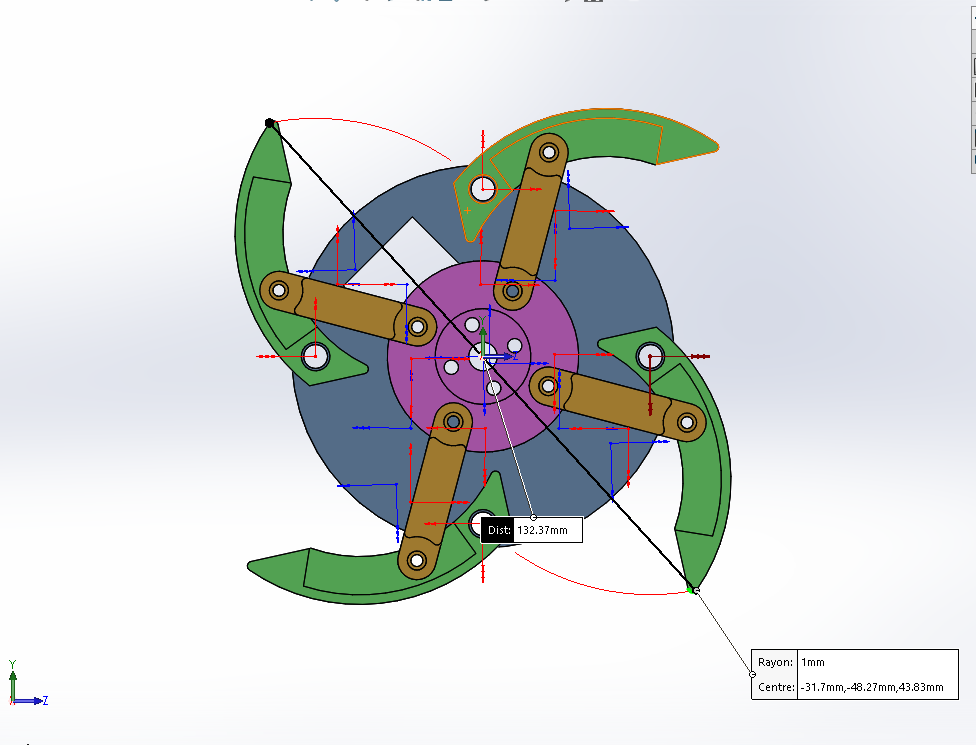

Deployable wheel: CAD model and prototype done at the school FabLab
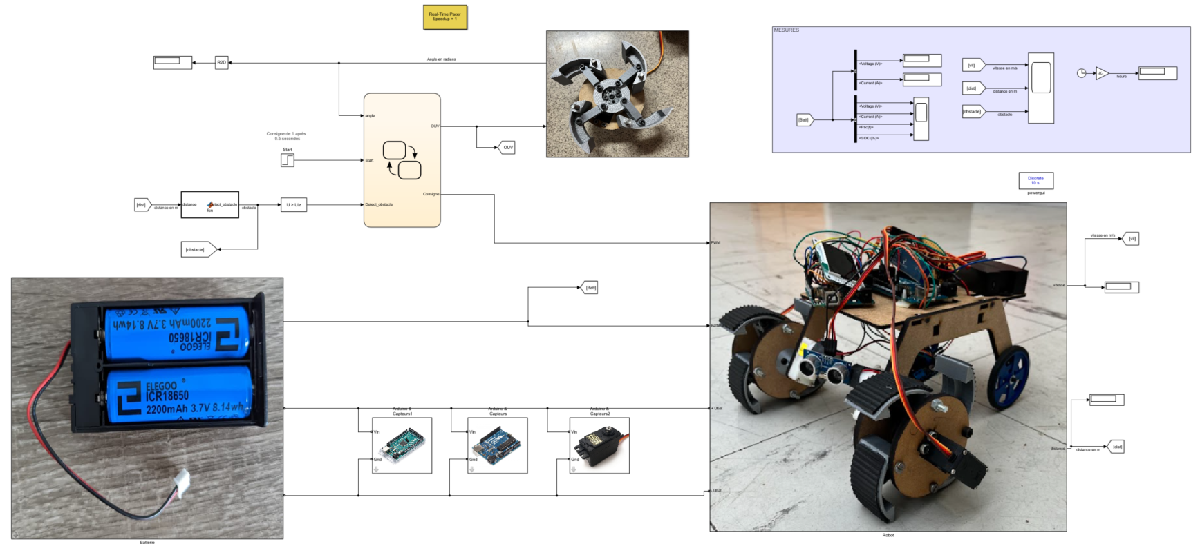
Simscape model
What was the team’s experience going from simulation to creating a prototype?
Transitioning from simulation to prototype involved significant effort and problem-solving. The students successfully connected their Simulink models to an Arduino board, allowing them to deploy the control program for motorization and sensor information management. They also utilized Stateflow to create a state diagram, enabling precise sequencing of the robot’s movements for obstacle climbing. Moreover, they addressed mechanical constraints by manufacturing the wheels using 3D printing and laser cutting techniques. Overcoming challenges such as assembly and rotational guidance, they found innovative solutions, including using bearings from the company IGUS.
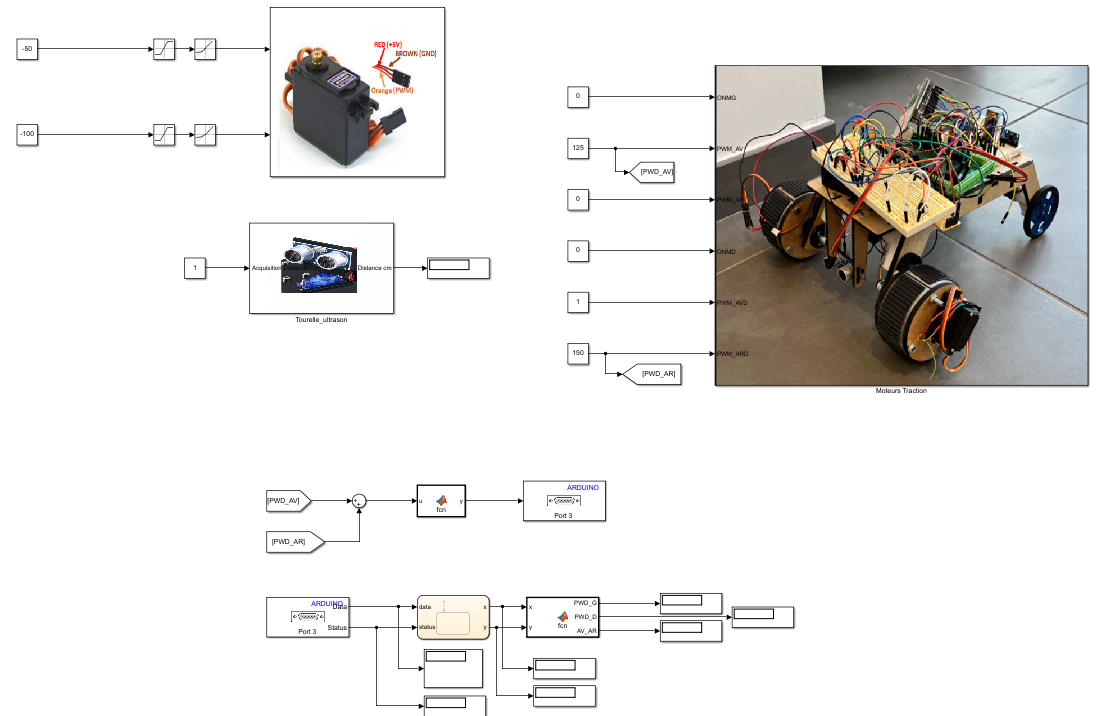
Electrical constraints required special attention to ensure proper connections and functionality between the battery, Arduino Mega board, servo motors, and motor drivers. The students learned soldering techniques and various types of electrical wiring to address these constraints

To incorporate the new mechanical evolutions and developments, the students successfully adapted the robot’s control program to incorporate the new mechanical developments, aligning it with the project specifications. This required understanding Stateflow charts and making necessary adjustments to ensure the smooth operation of the robot based on its updated mechanical design.
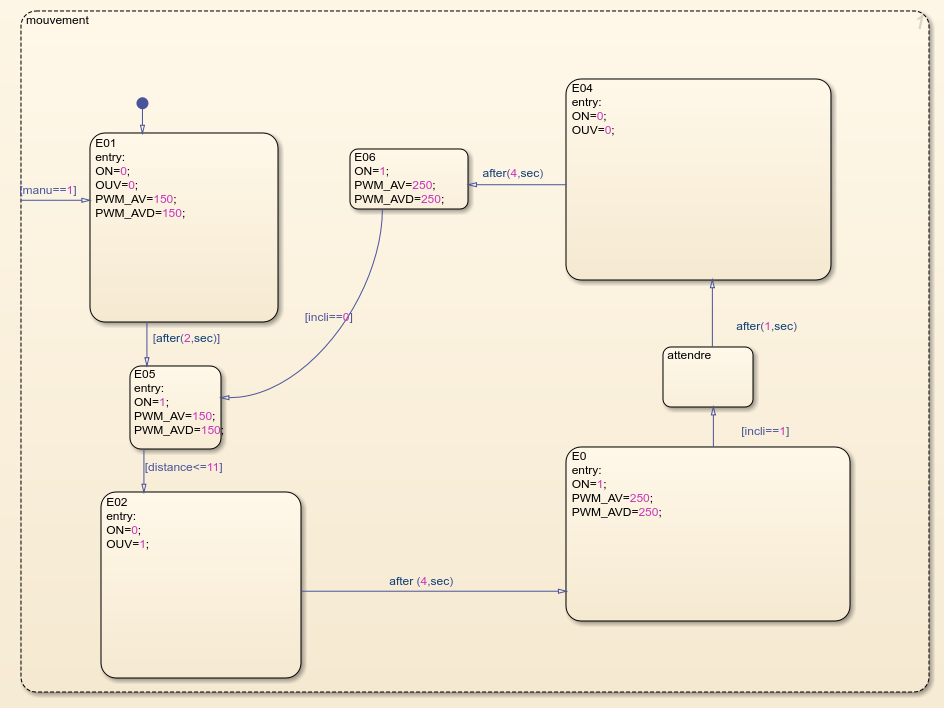
State diagrams developed with Stateflow
Conclusion
In conclusion, the HANDIWHEEL project embarked on an extraordinary human adventure. Under the guidance of their teachers Pierre Rabec and Mehdi Boughriet, the team consisted of highly motivated students: Luca Fontaine, Walid Atik, Matéo Guglielmi-Lacoux, Edern Deneuville, and Illya Liganov. These students have a passion for science and enjoy tackling challenges. Through their exceptional collective intelligence and unwavering teamwork, they brought the deployable wheel concept to life. From CAD modeling to simulation and prototype creation, their journey exemplifies the power of innovation and determination. We applaud their remarkable achievements and look forward to witnessing the positive impact of the HANDIWHEEL project on individuals with mobility challenges.

HANDIWHEEL Team







Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.