
Rescue on Mars: RTC Gransee team’s journey in the RoboCup Junior Onstage
In today’s blog, we will talk about the exciting journey of the RTC Gransee team in the RoboCup Junior OnStage Challenge. We’ll explore what the challenge entails, learn about the passionate team from Gransee, Germany, and dive into their creative project, “Rescue on Mars.” Join us as we uncover the technical and artistic elements of their performance and hear about the valuable lessons they learned along the way.
What is the RoboCup Junior Onstage Challenge ?
The RoboCup Junior OnStage Challenge is a division of the RoboCup Junior competition, which is part of the larger RoboCup initiative aimed at promoting robotics and artificial intelligence research. The OnStage Challenge specifically focuses on creativity, innovation, and theatrical performance. In this challenge, teams of young students design and program robots to perform a creative presentation or show. This can include elements such as dance and storytelling and must at the same time demonstrate a technical ability. The performance is centered on a specific theme chosen by the team that is aimed at combing robotics with artistic expression, encouraging participants to think outside the box and showcase their technical skills in a creative and engaging way.
Meet the RTC Gransee team
RTC Gransee is a team from the north-east of Germany from the small town of Gransee not far from Berlin. The team consists of the five students Willi, Simon, Gustav, Phil and Max and is supported by two mentors, Mr. Richter-Mendau and Mr. Castor from the Strittmatter-Gymnasium school.

The team has been participating in RoboCup Junior for 2 years, where they were European runners-up in 2023 and German champions in 2024. In 2024, they also took part in the World Championships in Eindhoven, Netherlands. The team has a passion for robotics and sees RoboCup Junior as a competition in robotics where participants have the most freedom and the opportunity to demonstrate their skills, compete with others, and improve their own skills and knowledge by exchanging ideas with other teams and companies.
How Did “Rescue on Mars” Come to Be?
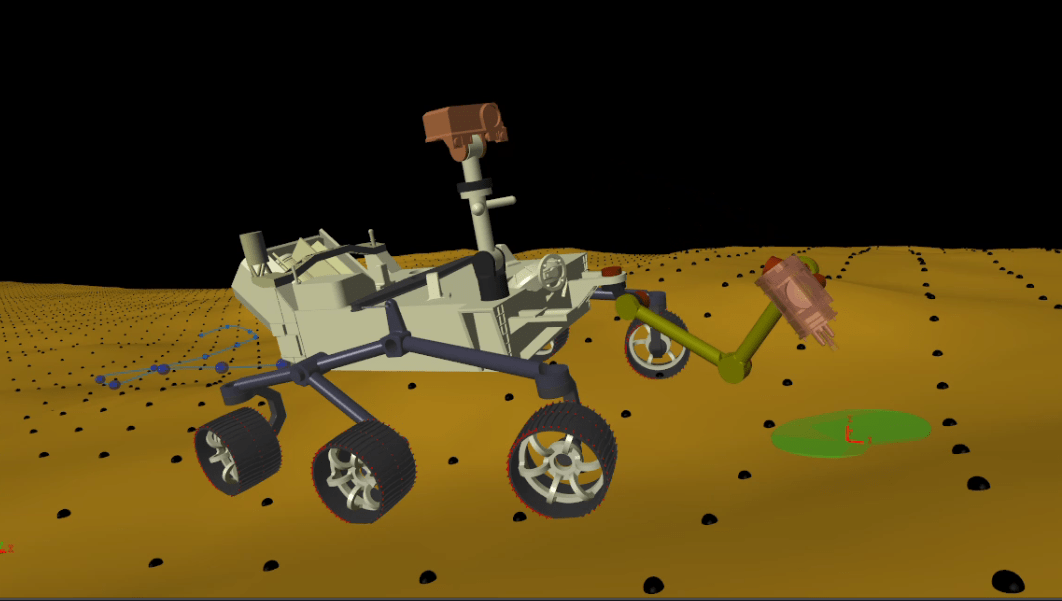
Last year, we focused on automated agriculture on Earth. In 2024, we wanted to go beyond Earth’s boundaries and venture into the unknown. We found Mars very interesting, and since rovers have already been to Mars, it provided the perfect basis for our show. Mars has not yet been fully explored, and a small NASA rover was supposed to improve this situation. One day, while searching for water, its engines failed, causing the rover to drive inexorably into a rock and crash. NASA tried to save it but was not up to the task. They asked us, the RTC Gransee team, for help. We designed and built a large rover to rescue the smaller one from its hopeless situation. On Mars, our rover made its way to the smaller rover, destroyed the rock, and refueled it with new energy so that it could move again. And that’s roughly the show.
Technical Aspects of the Mars Rovers
The mechanical parts of our Mars rovers are made from standard aluminum profiles, 3D-printed connectors, engine mounts, wheels, and other coverings. The printing required multiple attempts with different materials because the initial longevity and structural soundness were not optimal.
The next phase of our rover development was dedicated to the electronics and software. Here is a picture showing an overview of the technical wiring for the large Mars Rover:

It consists of 6 x DC Motors with encoder, 6 x H-Bridge, 1 x Arduino Due, stable motor power supply (12V) and raw voltage of 16V for the Due. The Due was connected to the Rasperberry Pi using a serial interface and the picture shows an overview of the techinal wiring for the large Mars Rover.
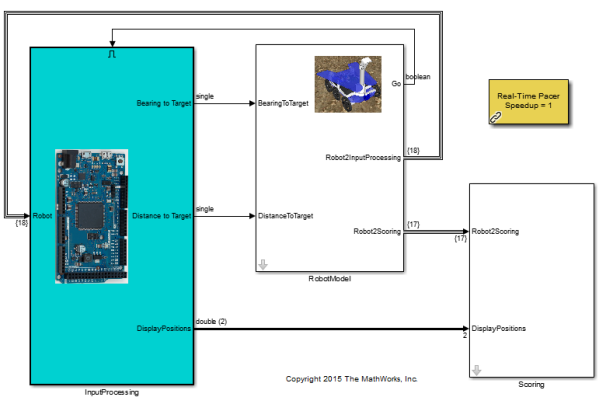
The Raspberry Pi 4 hosted the main program using a Stateflow chart which was uploaded on the board:

The functionality of the Mars Rover 5 was controlled by 5 buttons, a Time-of-flight sensor, a serial connection to Arduino Due and a link to Zigbee modules.
We used the Zigbee-Module for communication between and with the 5 robotic inputs which includes the large Mars Rover, small Mars Rover, the voice module, the Mars rock, and a hacking tool. Communication over Bluetooth was not an option because we encountered many problems during the competitions.
The Voice module allowed to use voice commands for individual robots. We utilized Rhasspy to intially translate the speech to text. The the text was further worked over in Python to program the commands.
Finally we directed the command to Zigbee as a bit sequence which translated the command and controlled the servos, LED, motor, etc.
An overview of the module can be seen here.


Regarding the driving chassis, we used an Arduino Due. The wheels needed to be synchronized to drive at the exact same speed to function properly. Therefore, we implemented a PID controller in C++ for each individual wheel. After a series of trials and errors, we found the optimal kp and kd values, allowing the robots to smoothly synchronize.
// Synchronisiere die Motoren
void syncMotor(int c, int t) {
setTacho();
delay(t / 3);
deltaTacho();
for (int k = 0; k < 6; k++) {
error[k] = t – abs(deltaGrad[k]);
deltaError[k] = error[k] – errorAlt[k];
if (dirMatrix[c][k] > 0) { // Geschwindigkeit ist negativ
speed[k] += (kp * error[k] + kd* deltaError[k]);
}
else if (dirMatrix[c][k] < 0) { // Geschwindigkeit ist negativ
speed[k] -= (kp * error[k] + kd* deltaError[k]);
}
else { // Haltemodus
{ speed[k] = 0; }
}
setMotor(k, speed[k]);
errorAlt[k] = error[k];
}
}
Team Insights: Lessons and Impressions
Participating in RoboCup Junior 2024, especially the world championship, provided us with a wealth of experience. The technology used by other teams was particularly interesting and new to us. Our interactions at the MathWorks® stand were also very helpful and informative. We are grateful for the opportunity to exchange ideas, as we learned many techniques that make using Simulink easier and more optimized. Additionally, the experience we gained on stage was invaluable. We now understand what is important on an international level and what we should definitely focus on.
- 범주:
- Robotics






댓글
댓글을 남기려면 링크 를 클릭하여 MathWorks 계정에 로그인하거나 계정을 새로 만드십시오.