Contents
Avi's pick of the week is a hardware support package
Image Acquisition Toolbox Support Package for Kinect For Windows Runtime, by
The Image Acquisition Toolbox Team. The hardware support package enables you to acquire RGB, depth images, and 3-D point clouds from a Kinect v2 sensor.
If you have a Kinect for Windows v2 you can start using it in MATLAB by downloading the hardware support package from File Exchange.
Using the Kinect for Windows v2 in MATLAB
Once you have sucessfuly installed the hardware support package you can connect to the device by defining a imaq.VideoDevice system object. Remember the Kinect v2 returns both RGB and depth images so we create a one system object for each
colorDevice = imaq.VideoDevice('kinect',1)
depthDevice = imaq.VideoDevice('kinect',2)
colorDevice =
imaq.VideoDevice with properties:
Device: 'Kinect V2 Color Sensor (kinect-1)'
VideoFormat: 'BGR_1920x1080'
ROI: [1 1 1920 1080]
ReturnedColorSpace: 'rgb'
ReturnedDataType: 'uint8'
DeviceProperties: [1x1 imaq.internal.DeviceProperties]
depthDevice =
imaq.VideoDevice with properties:
Device: 'Kinect V2 Depth Sensor (kinect-2)'
VideoFormat: 'Depth_512x424'
ROI: [1 1 512 424]
ReturnedColorSpace: 'grayscale'
ReturnedDataType: 'uint16'
DeviceProperties: [1x1 imaq.internal.DeviceProperties]
Initializing the device
Now lets initialize the device and grab an input RGB image and a depth image.
step(colorDevice);
step(depthDevice);
colorImage = step(colorDevice);
depthImage = step(depthDevice);
Get a 3-D point cloud from the device
Since the sensor has both color and depth information you can combine information from both sensor to create a 3-D point cloud.
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage);
Viewing the point cloud stream from the Kinect v2
Lets initialize the pcplayer that will let us visualize a live stream of 3-D point clouds. We first initialize the player.
player = pcplayer(ptCloud.XLimits,ptCloud.YLimits,ptCloud.ZLimits,...
'VerticalAxis','y','VerticalAxisDir','down');
xlabel(player.Axes,'X (m)');
ylabel(player.Axes,'Y (m)');
zlabel(player.Axes,'Z (m)');
for i = 1:500
colorImage = step(colorDevice);
depthImage = step(depthDevice);
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage);
view(player,ptCloud);
end

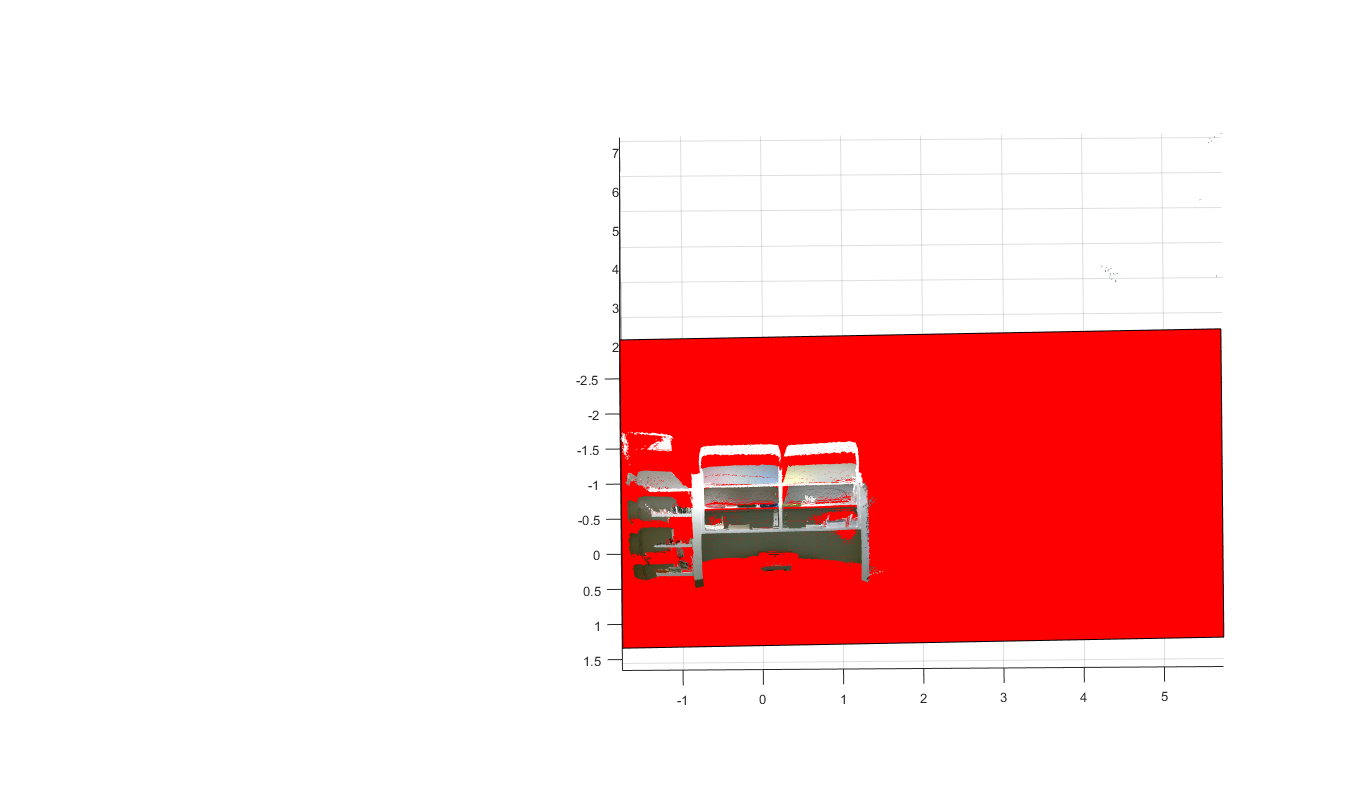
Detect planes in the 3-D point cloud
Once we have aquired a 3-D point cloud from the Kinect v2 we can process it using functionality in the Computer Vision System Toolbox. Here I simply extract and display planes in the 3-D point cloud.
colorImage = step(colorDevice);
depthImage = step(depthDevice);
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage);
maxDistance = 0.02;
referenceVector = [0,0,1];
maxAngularDistance = 5;
[model,inlierIndices,outlierIndices] = pcfitplane(ptCloud,maxDistance,referenceVector,maxAngularDistance);
figure;
pcshow(ptCloud);
hold on;
plot(model)
Release the device
When you are all doen don't forget to release the device.
release(colorDevice);
release(depthDevice);







コメント
コメントを残すには、ここ をクリックして MathWorks アカウントにサインインするか新しい MathWorks アカウントを作成します。