
Robots vs Humans in Soccer, and thereon…
Robotics applications can be incredibly varied and different; they range from simple automation tasks to elaborate humanoid systems that attempt to replicate human behavior. However, the current state of commercial robotics is still somewhat constrained to applications of mobile robots like vacuum cleaners and highly customized pick-and-place applications for industrial automation. Therefore, finding a problem statement that is both challenging and incremental enough to span decades of research can be difficult, but this is where soccer and RoboCup come in! Since I have been involved in RoboCup through MathWorks support for several years helping the teams that use MATLAB and Simulink, I thought it would be worth it to share my experience and some of RoboCup’s achievements in this blog.
Looking to the Future – The Year 2050
If you are not familiar, RoboCup is one of the biggest international robotics competitions and research communities. Their main vision and history is to collaborate to create robots that can play soccer against leading human teams by the year 2050. Soccer provides an ideal problem statement because it represents a high standard for both human athleticism and collaboration abilities. The development necessary to achieve something like this with machines includes research in artificial intelligence, multi-robot collaboration, robot locomotion, computer vision and perception, control systems, and pretty much every field related to robotics. This makes it a great problem to decompose into smaller technical challenges.

Starting Small
Since RoboCup is a competition that involves participants ranging from high school to doctoral researchers and industry professionals, they provide several leagues that decompose the challenges of creating robots that play soccer into more specific development tasks that provide growth paths for constantly contributing to the robotics community. Here is how I summarize some of the leagues along with some pictures from the events:
- Junior Soccer: For entry-level participants, they must program 1-2 robots per team and the field is about the size of a large table. Here there is an emphasis on learning algorithm development and building robots from common electronics kits. The robots mostly act individually as well.
- Simulation leagues: These leagues have the lowest cost of entry because no hardware is necessary. However, that doesn’t mean they are less challenging. Teams focus on programming multi-agent control and robot collaboration. At this stage, strategy starts becoming an essential part of competitive teams.
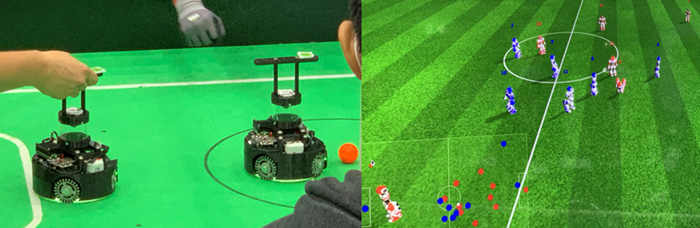
RoboCup Junior Soccer Robots (Left), RoboCup 3D Simulation (Right)
- Small-Size League: These are the fastest robots. They have an 18cm size requirement and play soccer with a golf ball in teams of 6 robots. One big change for this league is the team’s robots can be programmed with a centralized approach. Which simply put, means one computer can command multiple robots simultaneously. So, the challenge is simplified by providing environment information to teams in real time. This opens development bandwidth for teams to optimize their team strategies and environment interactions like producing rapid robots and achieving high-speed passes.
- Middle-Size League: In this league, the robots step up to playing with a regulation FIFA soccer ball. The robots still use wheels, but now perceive the environment on their own with built-in sensors and react to referee cues. More to come about this league…
RoboCup Soccer (Small and Medium size)
- Humanoid Leagues: These are the leagues where robots start having legs (ergo Humanoid). The challenges include mechanical design, mechatronics, control systems, and high-performance computing. You might see robots falling frequently, but you would be surprised at the advances teams make each year toward humanoid soccer robots. Most importantly, the robots you see are ongoing open development platforms in which much more than soccer playing can be tested. There are three humanoid leagues: The standard platform, which as the name suggests has all teams programming the same Softbank Nao robot platform, and there are Kids and Adult size leagues with two different size requirements.

RoboCup Soccer Humanoid (Kids and Adult sizes)
Current Achievements
The Matches – In short, humans can now play soccer against robots… 😮 Yes, as a concluding ceremony to the RoboCup finals, trustees from the RoboCup Federation play soccer against the winning robot team from the middle-sized league (see gif below from a match against the Tech United Eindhoven team). It is quite impressive, and robots occasionally score goals against humans too, which really shows the evolution of robotics research over the past few decades. It is worth noting that the TU/e team uses MATLAB and Simulink for their robot development along with other winning teams. MATLAB and Model-Based Design in Simulink along with automatic C++ code generation, allows the team to focus on their strategies and algorithms and easily pass knowledge on between team generations. If you watch matches from other leagues, they are equally impressive. In the small-sized league, the robots react so quickly that if a team was remotely controlled by humans, it would likely lose every time.

Current Middle Size Champion (TU/e) 2023 match against RCF Trustees
The Technology – RoboCup has become a source of important innovation for the robotics and artificial intelligence sector. Many of the robot platforms used like humanoids as well as the code and algorithms developed are open source and shared through conferences, including the RoboCup Research Symposium.
The Community – Being one of the largest international robotics competitions, RoboCup provides opportunities for students to get interested in STEM and have a growth path in learning and demonstrating robotics skills. There are universities and teams participating from every continent and as a teaser to the next section, the community spans way beyond robots that play soccer!
Technology Expansion, Home Robotics, and Next Challenges
Although RoboCup started as an initiative based around soccer-playing robots (and that is mostly what I covered so far), the competition quickly grew into several other cutting-edge robotics areas. RoboCup@Home, RoboCupRescue,and RoboCupIndustrial are leagues that host challenges relevant to those ongoing robotics topics. Along those lines, for the last couple of years MathWorks had the privilege of co-hosting a challenge within the @Home league called the Autonomous Robot Manipulation (ARM) challengewhere participants are exposed to grasping and perception challenges of manipulating real-life objects. If you are interested in MATLAB/Simulink for robotics or considering ways to participate remotely, the ARM challenge provides a good alternative and will be available again in 2024.

RoboCup@Home Robot-Toyota HSR (Left), RoboCup Industrial Logistics Robots (Top), RoboCup ARM Challenge Setup and 2023 Participants (Bottom)
Conclusion
Robotics can be tough… 😅 It is a complex multi-domain endeavor for which skills must be developed diligently; luckily, acquiring those skills is highly accessible now with opportunities to get involved in robotics competitions and educational programs for those interested in contributing to more widespread robots. RoboCup is the perfect example of pushing the boundaries of technology research by figuratively (and literally) setting goals that, given the current technology, may be seemingly unachievable but are incredibly inspiring.
- Category:
- Education,
- Robotics








Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.