For this week’s blog post, we’re featuring FRC Team 2040 from the FIRST Robotics Competition as they reflect on their 2026 season and share how they used Simulink and WPILib to coordinate their… read more >>

For this week’s blog post, we’re featuring FRC Team 2040 from the FIRST Robotics Competition as they reflect on their 2026 season and share how they used Simulink and WPILib to coordinate their… read more >>

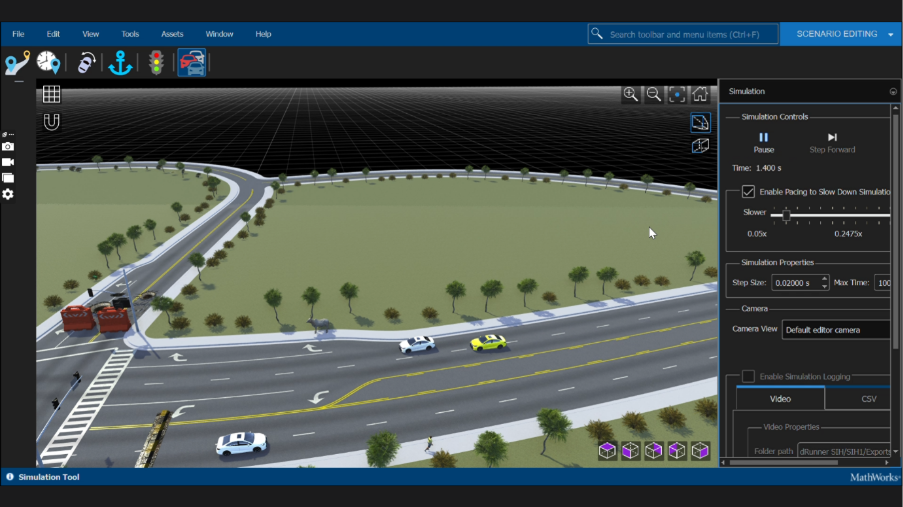
Today we are joined by students from The Ohio State University’s SAE AutoDrive II team – Buckeye AutoDrive.
Representing the Center for Automotive Research (CAR) and the Ohio State… read more >>

The MathWorks Cambridge office hosted the Europe 2025 edition of the MathWorks Minidrone Competition, welcoming students from universities across Europe. The 2025 edition drew applications from… read more >>
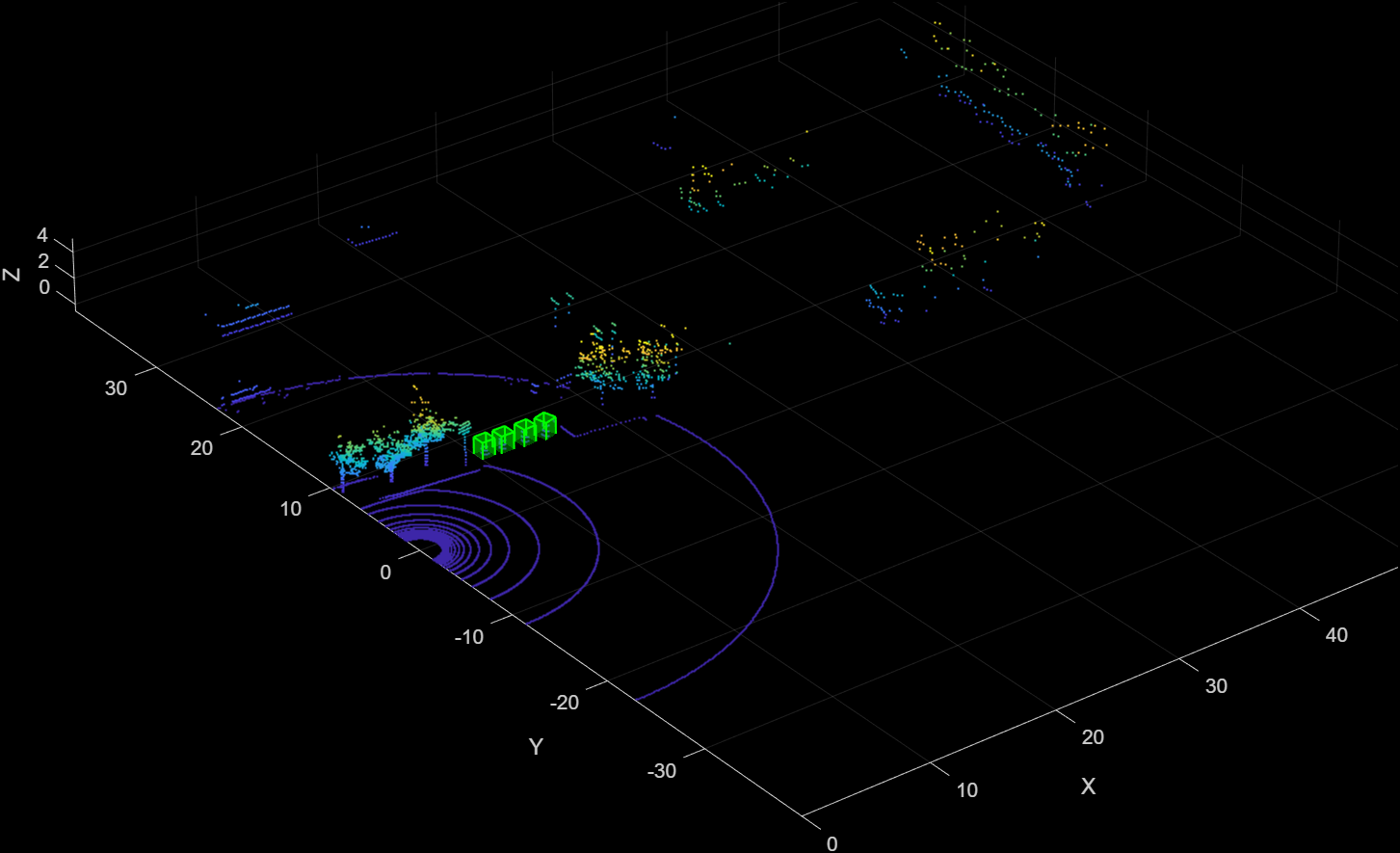
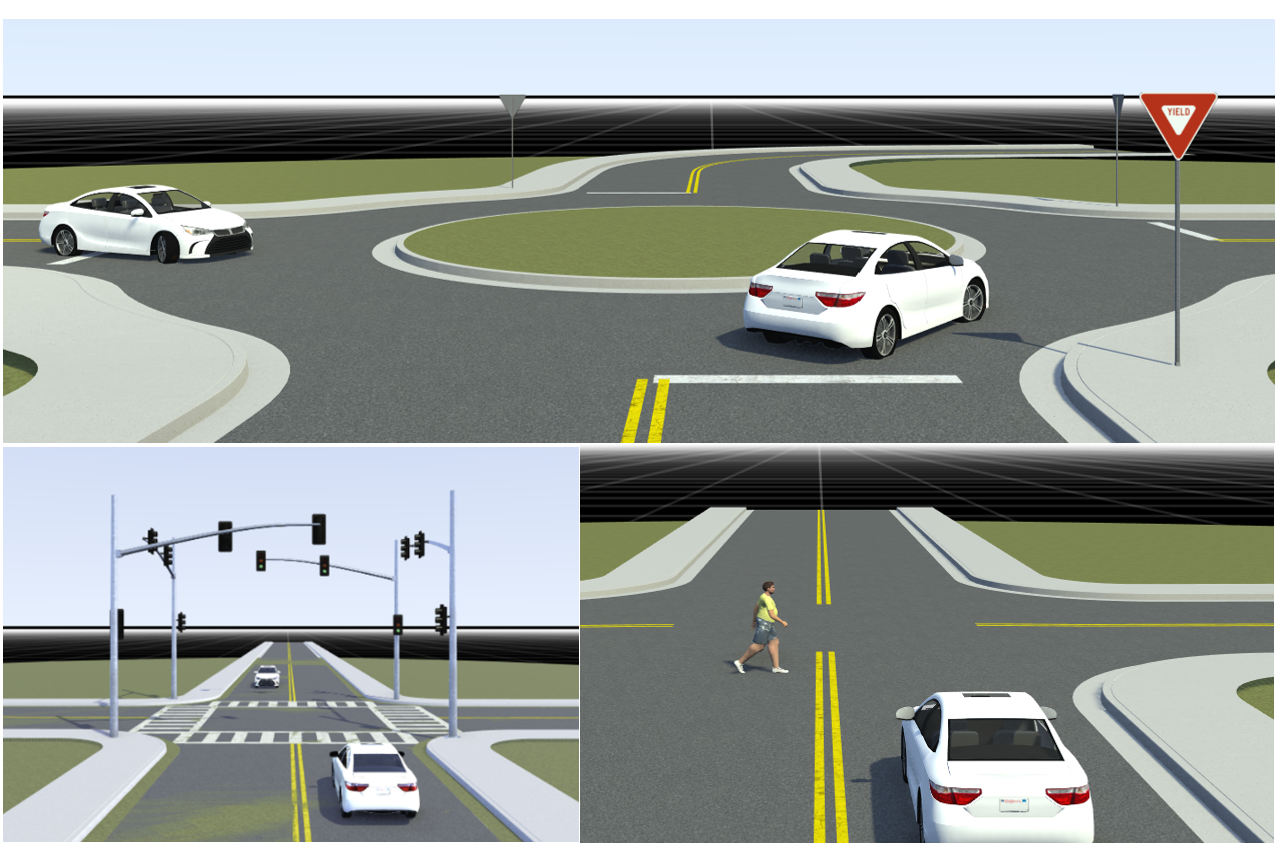
Today, we’re going through each step of creating a 3D object detector using Lidar data. We’ll start with an introduction to 3D point clouds and how to process them, then we’ll… read more >>
For this week’s blog post, we invited the DuBois Area Robotics team to share their journey and how they used MATLAB and Simulink for the 2025 BEST Robotics Championship. MathWorks is immensely… read more >>
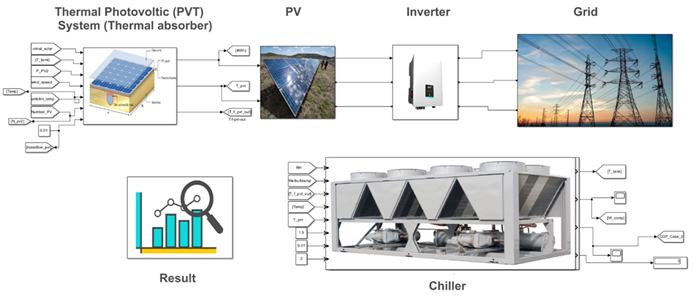
For today’s blog, we’re joined by Dr. Heba Al Zaben, Eng. Adham Yacoub, Eng. Waleed Mohamadieh, Eng. Omar Faire, and Eng. Khaled Al Halab from AlHussein Technical University, whose project earned… read more >>
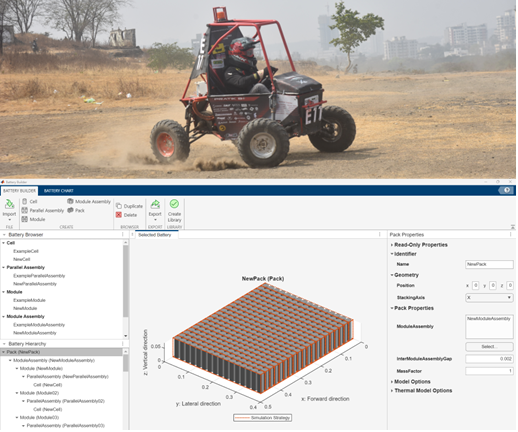
In today’s blog, we are joined by Team Endurance Racing from Vishwakarma Institute of Technology, Pune, who placed 1st in the BAJA SAEINDIA: MathWorks Electric Powertrain Simulation Challenge… read more >>
The Smart India Hackathon (SIH) is a nationwide initiative aimed at engaging students in addressing some of the most pressing challenges of everyday life. Established to promote a culture of… read more >>
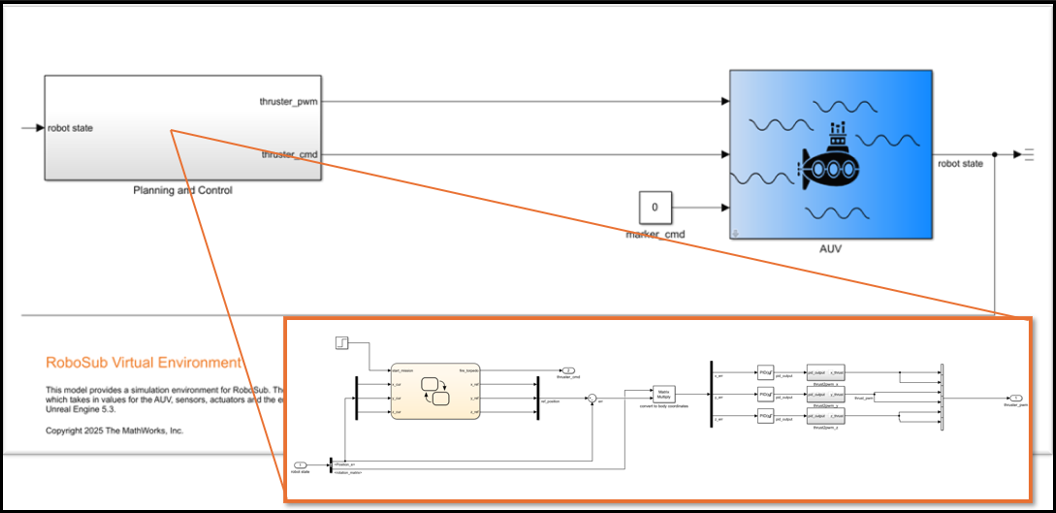
In today’s blog, Abhishek Shankar from the Student Programs team at MathWorks introduces a newly released underwater RoboSub simulation environment built with Simulink, Simulink 3D Animation, and… read more >>
Today we’re talking to Divyamaan Sahoo, who participated in the Development Collaborative Research Grant program at MathWorks, which supports academic research aligned with development priorities… read more >>
These postings are the author's and don't necessarily represent the opinions of MathWorks.