
Simulink for Natural Interaction Device
Although I work at a software company my background is in mechanical engineering, so I'm a sucker for hardware. You might have seen the work I did to link Simulink with the Arduino platform. Needless to say, I was pretty excited when I saw Takashi, my colleague in our Japanese office, demonstrate this submission which allows you to connect a natural interaction device (NID) like Microsoft's Kinect or ASUS's X-tion Pro to Simulink. He has built a library of Simulink blocks that let you pull in data from an NID plugged into your computer's USB port. The interface is built on OpenNI's existing library, but allows you to leverage Simulink and other products like the Computer Vision System Toolbox to quickly build some advanced algorithms to interperet your gestures or motion.
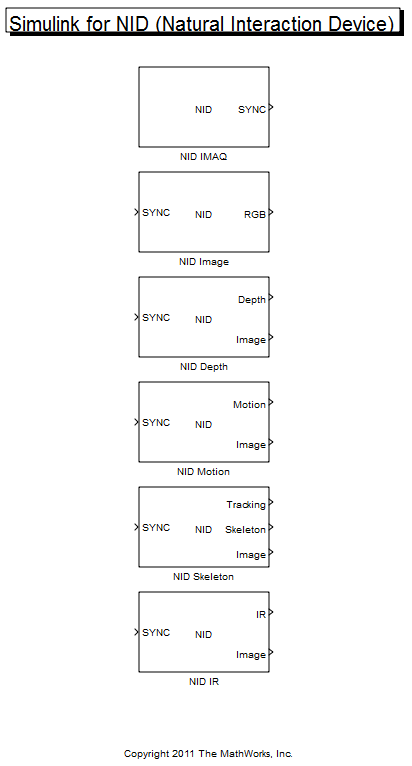
Unfortunately I don't have an NID (yet) so I haven't been able to try it out myself, but I have seen it demonstrated and was impressed with what could be done. The submission includes a library of basic blocks that allow you to acquire video, depth map, infrared data, motion information, and the location of joints in a skeleton:
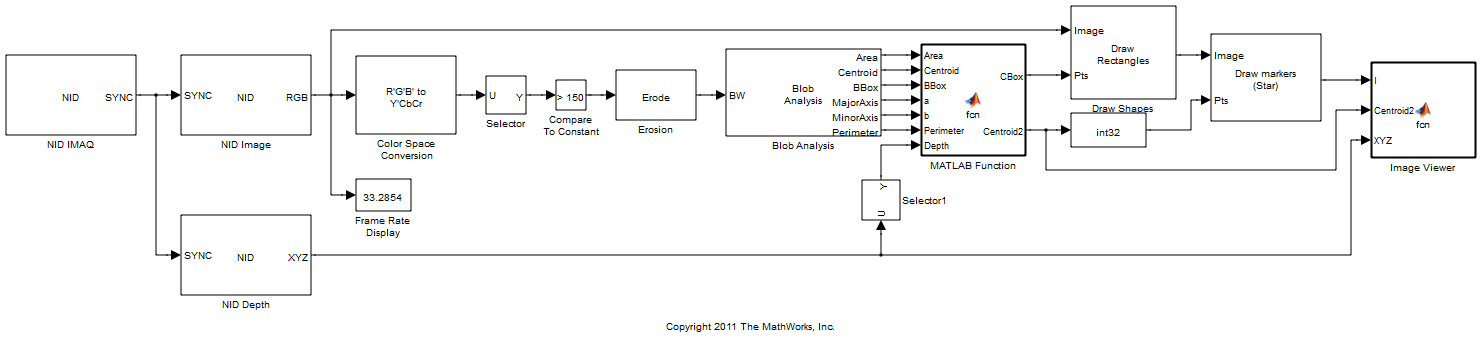
The submission also includes a couple of example models so you can get up and running quickly (click to enlarge):
Comments
If you get a chance to try it out, let me know here or leave a comment for Takashi.
- 类别:
- Picks







评论
要发表评论,请点击 此处 登录到您的 MathWorks 帐户或创建一个新帐户。