
Learning the Extended (Non-Linear) Kalman Filter
Brett's Pick this week is "Learning the Extended Kalman Filter", by Yi Cao.
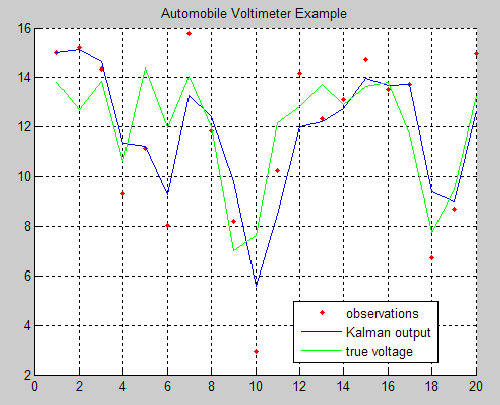
Last week I wrote about Michael Kleder's "Learning the Kalman Filter" submission. Kalman filtering of linear systems is fairly easy; Michael's tutorial gave us great insight in that regard. The application of Kalman filters to nonlinear systems isn't quite as straighforward, and Yi's submission provides a welcome introduction.
In his in-file example, Yi (who is currently, by the way, the second most-downloaded author on the File Exchange--our kind of people!) defines state equations for a tri-state nonlinear dynamic system, and then, from a noisy initial state, he simulates measurements of the system at 20 timesteps. His EKF function then calculates and returns, based on initial system covariance estimates/measurements, the estimated system states:

This is a nice follow-up to Michael's tutorial on the use of Kalman filtering in linear systems. Yi has a lot more to say about this and similar subjects. He has posted both MATLAB and Simulink tutorials on Kalman filtering, and has written (and submitted) on extended Kalman filters, unscented Kalman filters, Kalman-Bucy filtering, unconstrained optimization with Kalman filters, and neural networks using Kalman filters.
- Category:
- Picks







Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.