
Puzzler: Difficult algorithm development challenge
This week’s puzzler is significantly harder than others we have done in the past, I would be surprised (and delighted) to see an answer before I go home tonight…
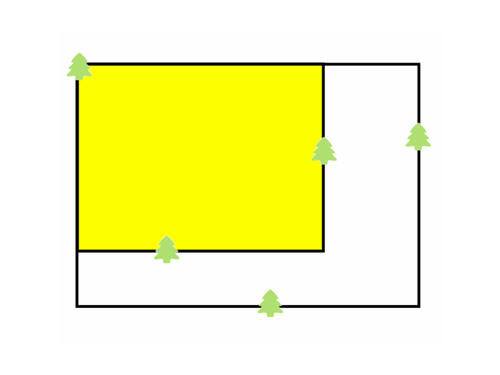
The challenge is shown below.
Given a group of trees, find the rectangular bounding box in the x-y direction that holds all the trees. Once you have that bounding box, look for the largest rectangle (by area) that can be made inside the bounding box. Of course, this rectangle can have no trees in the interior.
 Since this is a more difficult problem, you may want to look at the first video to see the outline for an algorithm to solve this:
Since this is a more difficult problem, you may want to look at the first video to see the outline for an algorithm to solve this:
Since this is a more difficult problem, you may want to look at the first video to see the outline for an algorithm to solve this:
function [bigArea, boundBox] = main(trees)
% bigArea and boundBox are structures that describe a rectangle and
% contain the fields:
% bigArea.x X of lower left corner
% bigArea.y Y of lower left corner
% bigArea.width Width of rectangle
% bigArea.height Height of rectangle
% bigArea is the largest open area
% boundBox is the bounding box of the entire set of trees
clc
n = 5;
trees.x = rand(1,n);
trees.y = rand(1,n);
[bigArea, boundBox] = main(trees);
clf
rectangle('position', [ bigArea.x bigArea.y bigArea.width bigArea.height], ...
'facecolor', [1 1 0])
rectangle('position', [boundBox.x boundBox.y boundBox.width boundBox.height])
axis([0 1 0 1])
line(trees.x,trees.y, ...
'color',[0 1 0], ...
'marker','^' , ...
'linestyle','none' , ...
'markersize',5 , ...
'linewidth',5)
- Category:
- Format: Video,
- Level: Advanced,
- Topic: Puzzler








Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.