
Simulink Pacer (Again)
Sean‘s pick this week is Simulink Pacing by MathWorks’ Simulink Development team.
Last summer, I highlighted the Simulink Pacer block as a means to slow a simulation down to a desired speed so you can see what’s happening. Yesterday, one my colleagues was demonstrating a customized prototype that streams data directly from Simulink to a cloud IoT platform. He elegantly used the new simulation pacing capabilities to slow the simulation so you could see the simulation in Simulink and the IoT dashboard updating at the same time.
Here’s the same model from last time. To enable simulation pacing in Simulink, select the “Simulation” drop down and then “Pacing Options”.
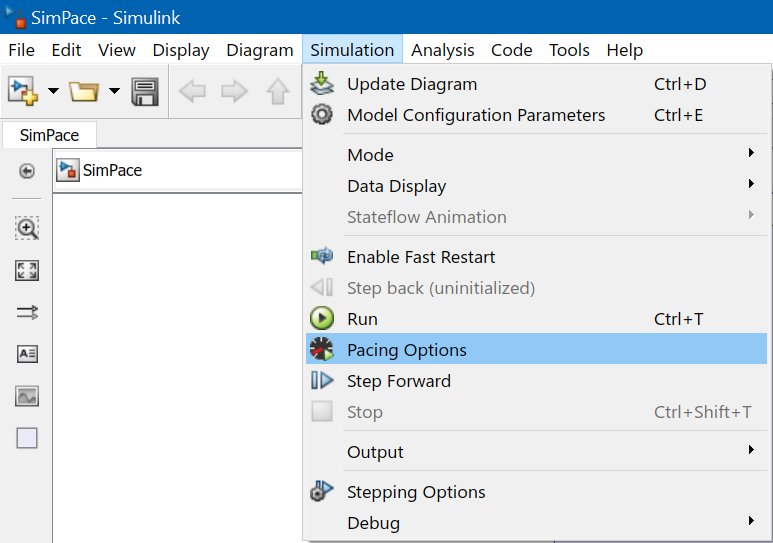
The new simulation pacing options allow me to drag the slider to adjust the speed as necessary.
Comments
Give R2018a a try and let us know what you think here.
Published with MATLAB® R2018a
- Category:
- Picks


Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.