
Announcing SimElectronics!
In early April, our physical modeling team released a new add-on for Simulink, SimElectronics.
SimElectronics extends Simscapeby adding tools for modeling electronics and electromechanical systems.
What is Simscape?
Simscape is a platform for physical modeling. Instead of connecting together blocks that define the equations of your system, Simscape and its add-on tools enable modeling and simulation of multidomain physical systems, such as those with mechanical, hydraulic, and electrical components. The connections between physical modeling elements are not signals, the connections don’t represent data flow. They represent physical connections between things
like bodies and joints, or resistors and transistors.
What’s new with SimElectronics?
SimElectronics adds components for modeling electronics and electromechanical systems.
- Includes semiconductors, actuators, sensors, and IC elements
- Includes the ability to simulate in PWM or Averaged mode to balance the level of
fidelity vs simulation speed - Import SPICE net lists containing Transistors, JFET, diode, sources, and passive SPICE
components
I think it helps to look at the web demos to understand what you might do with SimElectronics. These demos have great SVG published models that you can explore.
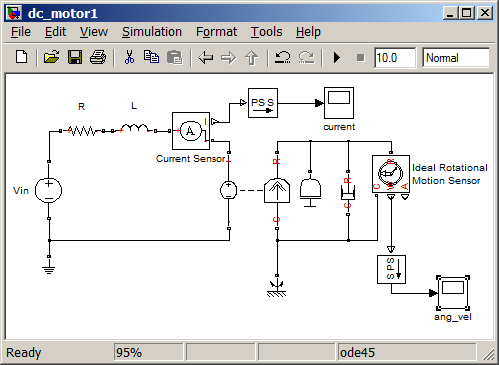
Video of SimElectronics in action
Steve Miller has made a video demo of Modeling an Electromechanical System. I recommend watching this to get the
SimElectronics experience.
Now it’s your turn
Are you using the physical modeling tools? Have you tried SimElectronics? Post a comment
here and tell us about it.
- Category:
- Modeling,
- What's new?







Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.