
New Blocks in Simulink R2010a
This is the time of year (in the northern hemisphere), where the ice and snow start to recede, the birds return, and the days start getting longer. It signals the arrival of ... a new release of MATLAB and Simulink! MATLAB R2010a is now available for download by licensed users from MathWorks.com.
Don't start with the release notes!
Instead of reading through the Simulink release notes, check out the Simulink 7.5 Latest Features page. It has most of the same information as the release notes, but it also includes links to a great presentation including highlights and screen shots from the release. There are links to videos that introduce some new features.
New Blocks
The rest of this post is dedicated to introducing you to a few new blocks in R2010a.
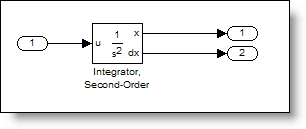
The Second Order Integrator block simplifies making accurate models of systems with limits. (Think of a ball hitting the ground: position stops at zero, and velocity immediately goes to zero also.)

These are different versions of the new Square Root Function block to perform square root, signed square root, and reciprocal square root operations.
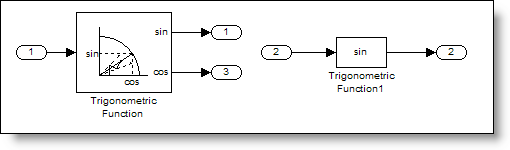
The Trigonometric Function block can now compute SIN and COS with the CORDIC approximation.
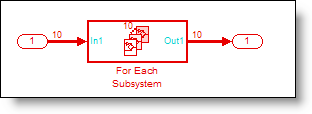
The For Each Subsystem makes it easy to take a scalar algorithm and apply it to a vector signal (or a vector algorithm and apply it to a matrix of signals, etc.). In the generated code, For Each Subsystems that have the same scalar algorithm but different dimension inputs can now share code.
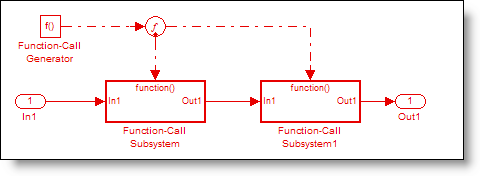
The Function Call Split blocks enable branching of function call lines. Now the same Function Call Initiator can execute multiple subsystems (eg: Function call generator, or Stateflow Chart.) This removes unnecessary rate transition blocks when there are data dependencies between two subsystems executed by the same initiator.
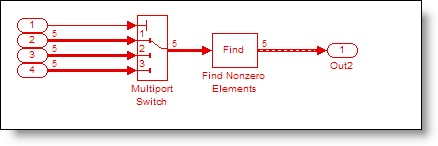
The Multiport Switch block now has labels on each of the ports to identify which values pass through that port. It also works with enumerated types. Now there is also a Find block, based on the popular MATLAB function. It will return the indices or subscripts of the non-zero elements of the vector/matrix signal at its input port. You can also return the values of those non-zero elements.
Now it's your turn
Read the release notes and tell me what new or enhanced feature of R2010a you are most interested in by leaving a comment here.
- Category:
- What's new?


See Also
-

Welcome R2013b!
Blogs
-
What's New in R2018a!
Blogs
-

What's New in R2020a
Blogs
-
-

Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.