
Causes of Algebraic Loops
A lot of people ask the question, "Why does my model have an algebraic loop?" Of course, every model is different, but here are some general truths about algebraic loops:
- Real physical systems don't have algebraic loops.
- If you model a physical system and get an algebraic loop, there is probably something missing in the model.
- Modeling short cuts simplify a simulation and make it more efficient, but can introduce algebraic loops.
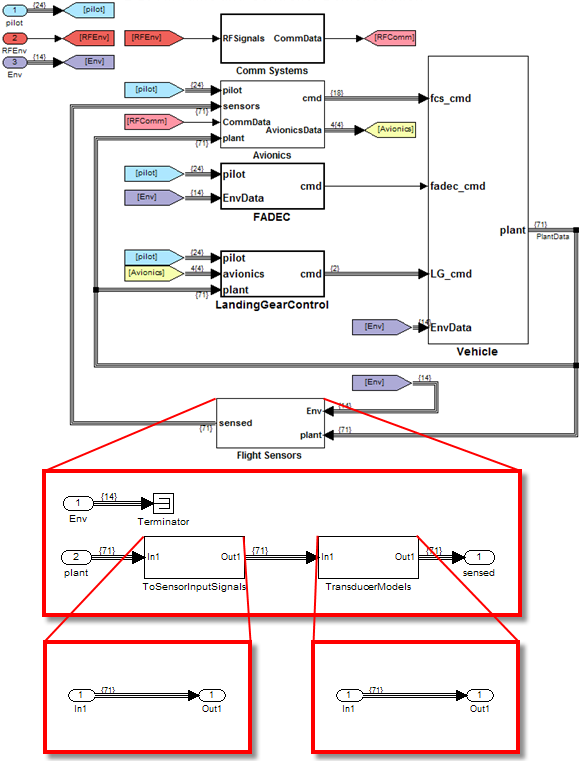
- Sensors and actuators are commonly ignored, especially for low fidelity models. These are ideal places to introduce delay into your system and break the loop.
Sensor Contest
Speaking of sensors, the 2010 Spring MATLAB programming contest started yesterday and is titled Sensor!
The topic of this contest is compression sensing technology for digital images. You have until Wednesday, May 5th, to look at the rules and create your submission.
You would like to be informed in advance of future programming contests? Visit the MATLAB Programming Contest Blog to get updates automatically.
Good luck!
Good luck fixing your algebraic loops, and entering the Sensor contest! Questions about algebraic loops? Leave a comment here and I'll try to answer.
- Category:
- Fun,
- Modeling,
- Physical Modeling,
- Simulink Tips



Comments
To leave a comment, please click here to sign in to your MathWorks Account or create a new one.